Automatische Übersetzung anzeigen
Dies ist eine automatisch generierte Übersetzung. Wenn Sie auf den englischen Originaltext zugreifen möchten, klicken Sie hier
#Produkttrends
{{{sourceTextContent.title}}}
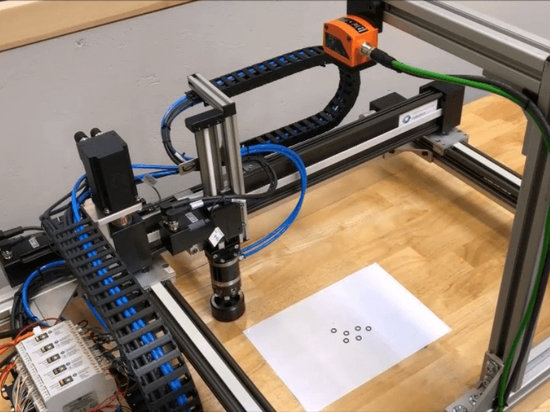
Drei wichtige Konstruktionsüberlegungen für kartesische Roboter
{{{sourceTextContent.subTitle}}}
Systemkonfiguration, Kabelmanagement, Steuerungen.
{{{sourceTextContent.description}}}
Wenn Ihre Anwendung einen kartesischen Roboter erfordert, haben Sie eine Vielzahl von Optionen, je nach dem Grad der Integration, die Sie vornehmen möchten. Und obwohl vorgefertigte kartesische Roboter immer häufiger eingesetzt werden, da die Hersteller ihre Produktpalette erweitern, um einem breiteren Spektrum von Leistungskriterien gerecht zu werden, erfordern einige Anwendungen immer noch den Bau Ihres eigenen kartesischen Systems - zum Beispiel, um speziellen Umgebungsbedingungen oder hochspezialisierten Leistungsanforderungen gerecht zu werden.
Aber "selbst bauen" bedeutet nicht unbedingt "von Grund auf neu bauen" Ein Beispiel: Die Schlüsselkomponenten eines kartesischen Roboters - die Linearaktuatoren - sind in zahlreichen Konfigurationen erhältlich, so dass es selten notwendig ist, die Aktuatoren von Grund auf neu zu bauen. Und viele Hersteller von Linearaktuatoren bieten Verbindungssätze und Montagehalterungen an, die den Zusammenbau Ihres eigenen kartesischen Systems aus katalogspezifischen Aktuatoren zu einer relativ einfachen Übung machen.
Die Bestimmung des grundlegenden Layouts und die Auswahl der geeigneten Linearaktoren ist jedoch nur der erste Schritt. Um zu vermeiden, dass Sie am Ende ein kartesisches System erhalten, das die Anforderungen der Anwendung nicht erfüllt oder nicht in den zu erwartenden Platzbedarf passt, sollten Sie die folgenden Überlegungen - insbesondere während der Entwurfsphase - im Hinterkopf behalten.
System-Konfiguration
Eines der ersten Dinge, die bei der Konstruktion eines kartesischen Roboters festgelegt werden müssen, ist die Konfiguration der Achsen, nicht nur um die erforderlichen Bewegungen zu erreichen, sondern auch um sicherzustellen, dass das System eine ausreichende Steifigkeit aufweist, was sich auf die Tragfähigkeit, Verfahr- und Positioniergenauigkeit auswirken kann. Tatsächlich sind einige Anwendungen, die eine Bewegung in den kartesischen Koordinaten erfordern, von einem Portalroboter besser bedient als von einem kartesischen System, insbesondere wenn die Y-Achse einen langen Hub benötigt oder wenn die kartesische Anordnung eine große Momentenbelastung auf eine der Achsen ausüben würde. In diesen Fällen können die Dual-X- oder Dual-Y-Achsen eines Portalsystems erforderlich sein, um eine übermäßige Durchbiegung oder Vibration zu vermeiden.
Wenn ein kartesisches System die beste Lösung ist, ist die nächste Konstruktionsoption typischerweise die Antriebseinheit für die Aktoren - wobei die gängigste Wahl ein Riemen-, Schrauben- oder pneumatisch angetriebenes System ist. Und unabhängig vom Antriebssystem werden Linearaktuatoren in der Regel entweder mit einer einzelnen Linearführung oder mit zwei Linearführungen angeboten.
Die überwiegende Mehrheit der kartesischen Roboter verwendet die Doppelführungskonfiguration, da sie eine bessere Unterstützung für fliegend gelagerte (Momenten-)Lasten bietet - jedoch haben Achsen mit Doppel-Linearführungen eine größere Stellfläche als Achsen mit Einfach-Linearführungen. Andererseits sind Doppelführungssysteme oft kürzer (in vertikaler Richtung), wodurch Interferenzen mit anderen Teilen der Maschine vermieden werden können. Der Punkt ist, dass die Art der Achsen, die Sie wählen, nicht nur die Leistung des kartesischen Systems beeinflusst, sondern auch den gesamten Platzbedarf.
Kabelmanagement
Ein weiterer wichtiger Aspekt des kartesischen Roboterdesigns, der in den frühen Phasen oft übersehen wird (oder einfach auf spätere Phasen des Designs verschoben wird), ist das Kabelmanagement. Jede Achse erfordert mehrere Kabel für Strom, Luft (für pneumatische Achsen), Encoder-Feedback (für servo-angetriebene kartesische Roboter), Sensoren und andere elektrische Komponenten. Und wenn Systeme und Komponenten in das industrielle Internet der Dinge (Industrial Internet of Things, IIoT) integriert werden, werden die Methoden und Werkzeuge für ihre Verbindung noch kritischer. All diese Kabel, Drähte und Steckverbinder müssen sorgfältig verlegt und gehandhabt werden, um sicherzustellen, dass sie nicht durch übermäßige Biegung vorzeitig ermüden oder durch Interferenzen mit anderen Teilen des Systems beschädigt werden.
Kartesische (sowie SCARA- und 6-achsige) Roboter machen diese Konnektivität noch anspruchsvoller, da sich die Achsen sowohl unabhängig als auch synchron zueinander bewegen können. Aber eine Sache, die dazu beitragen kann, die Komplexität des Kabelmanagements zu verringern, ist die Verwendung von Komponenten, die die Anzahl der benötigten Kabel reduzieren - zum Beispiel Motoren, die Leistung und Feedback in einem einzigen Kabel integrieren, oder integrierte Motor-Antriebskombinationen.
Die Art der Steuerung und das Netzwerkprotokoll können auch die Art und Menge der benötigten Kabel und die Komplexität des Kabelmanagements beeinflussen. Und vergessen Sie nicht, dass das Kabelmanagementsystem - Kabelträger, Schalen oder Gehäuse - die Abmessungen des Gesamtsystems beeinflusst. Daher ist es wichtig, auf Interferenzen zwischen dem Kabelmanagementsystem und den anderen Teilen des Roboters und der Maschine zu prüfen.
Steuert
Kartesische Roboter sind die Lösung für Punkt-zu-Punkt-Bewegungen, aber sie können auch komplexe interpolierte Bewegungen und konturierte Bewegungen erzeugen. Anhand der Art der erforderlichen Bewegung lässt sich bestimmen, welches Steuerungssystem, Netzwerkprotokoll, HMI und andere Bewegungskomponenten für das System am besten geeignet sind. Und obwohl diese Komponenten zum größten Teil getrennt von den Achsen des kartesischen Roboters untergebracht sind, beeinflussen sie, welche Motoren, Kabel und andere elektrische Komponenten auf der Achse erforderlich sind. Und diese Komponenten auf der Achse spielen wiederum eine Rolle bei den ersten beiden Konstruktionsüberlegungen: Konfiguration und Kabelmanagement.
Der Designprozess verläuft also "im Kreis" und unterstreicht erneut, wie wichtig es ist, einen kartesischen Roboter als eine integrierte elektromechanische Einheit zu entwerfen und nicht als eine Reihe mechanischer Komponenten, die lediglich mit elektrischer Hard- und Software verbunden sind.