Automatische Übersetzung anzeigen
Dies ist eine automatisch generierte Übersetzung. Wenn Sie auf den englischen Originaltext zugreifen möchten, klicken Sie hier
#Produkttrends
{{{sourceTextContent.title}}}
Bewegungs-Szenarien: Pick-and-Place-Anwendungen
{{{sourceTextContent.subTitle}}}
Die Entwicklung umfassender Automatisierungslösungen für Hochgeschwindigkeits-Pick-and-Place-Anwendungen gehört zu den anspruchsvollsten Aufgaben von Antriebsingenieuren
{{{sourceTextContent.description}}}
Da Robotersysteme immer komplexer werden und die Produktionsraten immer weiter ansteigen, müssen Systementwickler mit den neuesten Technologien Schritt halten oder riskieren, ein nicht optimales Design zu spezifizieren. Sehen wir uns einige der neuesten verfügbaren Technologien und Komponenten an und schauen wir uns genau an, wo sie zum Einsatz kommen.
Roboterarme für kompakte Konstruktionen
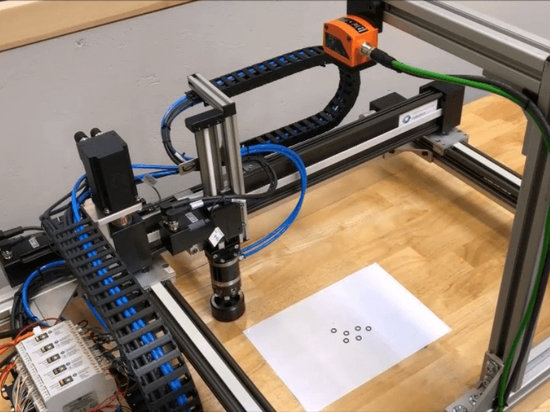
Industrielle Roboterarme sind in der Regel nicht dafür bekannt, leichtfüßig zu sein. Vielmehr haben die meisten von ihnen eine solide Konstruktion, die schwere Werkzeuge am Ende des Arms tragen muss. Trotz der Vorteile einer robusten Konstruktion sind diese Roboterarme für empfindliche Anwendungen zu schwer und sperrig. Um wendigere Arme für leichtere Aufgaben geeignet zu machen, haben die Ingenieure der igus Inc. in Köln ein Mehrachsengelenk entwickelt, das es ermöglicht, kleine Lasten um einen Ausleger zu schwenken. Das neue Gelenk eignet sich gut für filigrane Pick-and-Place-Anwendungen, bei denen die Greifkraft je nach Bedarf angepasst werden kann.
Flexibilität und geringes Gewicht sind die wichtigsten Konstruktionsparameter des neuen Gelenks, das aus Kunststoff und Kabelsteuerung besteht. Kurz gesagt werden die Kabel vom Schultergelenk des Arms durch kompakte bürstenlose Gleichstrom-Servomotoren von FAULHABER bewegt, was Trägheit im Arm verhindert, dynamische Bewegungen erleichtert und den Platzbedarf minimiert.
Die Ingenieure haben sich bei der Konstruktion weitgehend am menschlichen Ellbogengelenk orientiert, so dass zwei Bewegungsabläufe - Rotation und Schwenkung - in einem einzigen Gelenk kombiniert sind. Ähnlich wie bei einem menschlichen Arm sind die schwächsten Teile des Roboterarms nicht die Knochen (das Körperrohr des Roboterarms) oder die Muskeln (der Antriebsmotor), sondern die Sehnen, die die Kraft übertragen. Die Hochspannungs-Steuerkabel bestehen hier aus einem superstarken UHMW-PE-Polyethylenmaterial mit einer Zugfestigkeit von 3.000 bis 4.000 N/mm2. Neben den traditionellen Roboterarmfunktionen wie Pick-and-Place-Anwendungen eignet sich das Gelenk auch für spezielle Kameraausrüstungen, Sensoren oder andere Werkzeuge, bei denen eine leichte Konstruktion erforderlich ist. Für hohe Präzision ist in jedem Gelenk ein magnetischer Winkelstellungssensor eingebaut.
Die elektronisch kommutierten Servomotoren weisen eine geringe bewegte Masse auf, die für den dynamischen Einsatz geeignet ist: Die Betriebsspannung von 24 Vdc ist für Batteriebetrieb ausgelegt, was für den Einsatz in mobilen Anwendungen entscheidend ist, während das Motordrehmoment von 97 mNm die durchmesserkonformen Planetengetriebe auf die für den Armbetrieb erforderlichen Werte anhebt. Zudem haben diese bürstenlosen Antriebe außer dem Rotorlager keine Verschleißteile, was eine Lebensdauer von mehreren zehntausend Stunden garantiert.
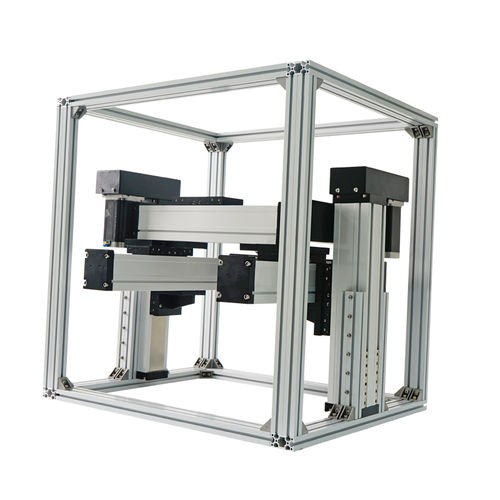
Lineares Bewegungssystem beschleunigt Laborautomatisierung
Neben den traditionellen Verpackungs- und Montagevorgängen findet das Pick-and-Place-Verfahren auch in der Hochgeschwindigkeits-Laborautomatisierung immer mehr Anwendung. Stellen Sie sich vor, Sie müssten täglich Millionen von Bakterienproben handhaben, und Sie haben eine Vorstellung davon, was von den heutigen Biotech-Labors erwartet wird. In einer Anlage ermöglicht ein fortschrittliches lineares Bewegungssystem einem Biotech-Laborroboter namens RoToR, Arrays von Zellen mit einer rekordverdächtigen Geschwindigkeit von mehr als 200.000 Proben pro Stunde zu pinnen. RoToR stammt von Singer Instruments, Somerset, Großbritannien, und wird als Tischautomatisierungssystem für die Gen-, Genom- und Krebsforschung eingesetzt. Einer dieser Roboter bedient oft mehrere Labore, wobei die Wissenschaftler kurze Zeitfenster für die Replikation, Paarung, Neuanordnung und Sicherung von Bakterien- und Hefebibliotheken reservieren.
Ein Echtzeit-Controller steuert die drei Bewegungsachsen, die die Punkt-zu-Punkt-Pinning-Bewegungen des Roboters koordinieren, sowie eine Achse für die Probenhandhabung und bildet eine Schnittstelle zur Benutzeroberfläche des Roboters. Darüber hinaus verwaltet die Steuerung auch alle E/A-Kanäle.
Neben der Steuerung lieferte Baldor auch einen linearen Servomotor und Antrieb sowie drei integrierte Schrittmotor- und Antriebsmodule. Der Roboter führt Punkt-zu-Punkt-Transfers von Quell- zu Zielplatten entlang einer linearen Servomotorachse durch, die über die gesamte Maschinenbreite verläuft. Diese Achse unterstützt einen zweiachsigen Schrittmotorkopf, der den Pinningvorgang steuert. Die kombinierte X-Y-Z-Bewegung kann sogar Proben mit einer komplexen schraubenförmigen Bewegung rühren. Die separate Schrittmotorachse steuert den Lademechanismus der Stiftköpfe. Pneumatische Greifer und Rotatoren steuern weitere Bewegungen der Maschine, z. B. das Aufnehmen und Ablegen der Nadelköpfe zu Beginn und am Ende des Vorgangs.
Ursprünglich wollte Singer einen pneumatischen Antrieb für die Hauptquerachse verwenden, aber diese Konstruktion konnte nicht die gewünschte Positionierauflösung oder Geschwindigkeit liefern und war für eine Laborumgebung zu laut. Daraufhin begannen die Ingenieure, Linearmotoren in Betracht zu ziehen. Baldor entwickelte einen kundenspezifischen bürstenlosen linearen Servomotor mit mechanischen Modifikationen an der linearen Schiene, so dass diese nur an den Enden und nicht in Längsrichtung gelagert werden kann - so fungiert der Motor als X-Achsen-Portal, das die Y- und Z-Achsen trägt. Schließlich minimiert das Magnetdesign des Linearmotors das Rastmoment, um eine gleichmäßige Bewegung zu ermöglichen.