Automatische Übersetzung anzeigen
Dies ist eine automatisch generierte Übersetzung. Wenn Sie auf den englischen Originaltext zugreifen möchten, klicken Sie hier
#Produkttrends
{{{sourceTextContent.title}}}
Was ist ein kartesischer Roboter?
{{{sourceTextContent.subTitle}}}
Im Gegensatz zu einem anderen Robotertyp oder einem mehrachsigen System.
{{{sourceTextContent.description}}}
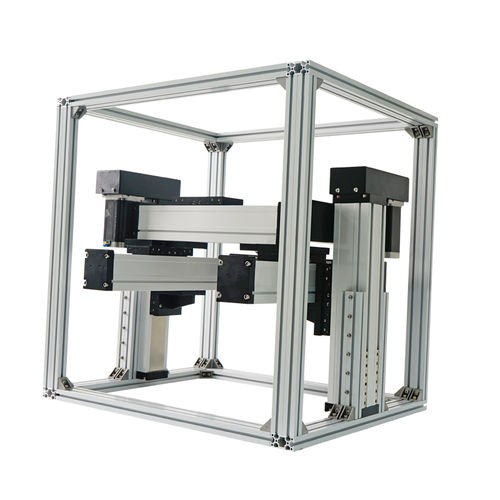
Erstens ist ein kartesisches System ein System, das sich in drei orthogonalen Achsen - X, Y und Z - entsprechend den kartesischen Koordinaten bewegt. (Es ist jedoch anzumerken, dass eine Drehachse - in Form eines Endeffektors oder eines Werkzeugs am Ende des Arms - manchmal in der äußersten Achse eines kartesischen Roboters enthalten ist)
Was einen kartesischen Roboter zu einem Roboter macht, ist, dass die Achsen über eine gemeinsame Bewegungssteuerung eine koordinierte Bewegung ausführen.
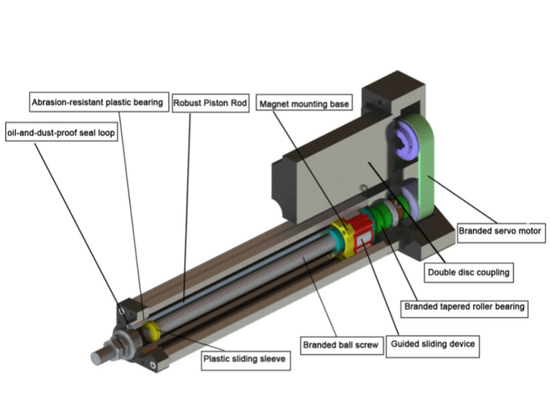
Die Achsen eines kartesischen Roboters bestehen aus einer Art Linearantrieb - entweder als vormontiertes System von einem Hersteller gekauft oder vom OEM oder Endbenutzer aus Linearführungs- und Antriebskomponenten kundenspezifisch gefertigt.
Einfach, oder?
Aber nicht jedes Linearsystem, das in den X-Y- oder X-Y-Z-Achsen arbeitet, ist ein kartesischer Roboter. Eine bemerkenswerte Ausnahme ist ein Robotertyp, bei dem zwei Basisachsen (X) parallel angeordnet sind. Diese Konfiguration - z. B. 2X-Y oder 2X-Y-Z - verschiebt den Roboter aus der Kategorie der kartesischen Roboter in die Kategorie der Portalroboter.
Der Hauptunterschied zwischen Gantry-Robotern und kartesischen Robotern besteht darin, dass ein kartesischer Roboter auf jeder Achse einen Linearantrieb verwendet, während ein Gantry-Roboter immer mit zwei Basisachsen (X) konstruiert ist, die von der zweiten Achse (Y) überspannt werden. Diese Konfiguration verhindert, dass die zweite Achse freitragend ist (mehr dazu weiter unten), und ermöglicht Portalrobotern viel größere Hublängen - und in vielen Fällen auch größere Traglasten - als kartesischen Robotern.
Der zweite Typ von mehrachsigen Linearsystemen, der nicht unter die Definition des kartesischen Roboters fällt, ist der XY-Tisch. Der Unterschied zwischen kartesischen Robotern und XY-Tischen liegt in der Montage- und Ladeanordnung. Bei einem kartesischen Roboter ist die zweite oder dritte (Y- oder Z-) Achse freitragend und wird nur an einem Ende von der darunter liegenden Achse getragen. Darüber hinaus ist die Last auf der äußeren Achse im Allgemeinen von dieser Achse auskragend.
Diese Anordnung erzeugt nicht nur eine Momentbelastung auf die äußere Achse aufgrund der aufgebrachten Last, sondern auch eine erhebliche Momentbelastung auf die tragende Achse aufgrund der kombinierten Wirkung der aufgebrachten Last zusammen mit der äußeren Achse. Die Montage- und Belastungsanordnung schränkt die Tragfähigkeit kartesischer Roboter ein und ist ein wichtiger Faktor bei der Bestimmung der maximalen Hublänge für die äußere (freitragende) Achse.
Im Gegensatz dazu bestehen XY-Tische aus zwei übereinander zentrierten Achsen, die oft ähnliche Hublängen aufweisen. Darüber hinaus ist die Last im Allgemeinen auf der Y-Achse zentriert. Diese Achsenkonfiguration und Lastpositionierung führt zu einer sehr geringen freitragenden Belastung auf einer der beiden Achsen (und oft zu keiner freitragenden Belastung auf der Y-Achse).
Kartesische Roboter überschneiden sich in einigen technischen Spezifikationen mit SCARA- und 6-achsigen (knickgelenkten) Robotern und können in einigen der gleichen Anwendungen eingesetzt werden, aber kartesische Roboter haben mehrere Vorteile gegenüber SCARA- und 6-achsigen Typen. Erstens bieten kartesische Konstruktionen einen rechteckigen Arbeitsbereich, in dem ein beträchtlicher Prozentsatz der Grundfläche des Roboters als aktiver Arbeitsbereich genutzt wird. SCARA- und 6-Achsen-Roboter hingegen haben einen kreisförmigen oder ovalen Arbeitsbereich, der oft viel toten (ungenutzten) Raum bietet, insbesondere wenn der erforderliche Verfahrweg oder die Reichweite sehr groß ist.
Kartesische Roboter können aus praktisch jeder Art von Linearantrieb mit einer Vielzahl von Antriebsmechanismen gebaut werden - Riemen, Kugel- oder Leitspindel, pneumatischer Antrieb oder Linearmotor. (Zahnstangen- und Ritzelantriebe sind ebenfalls möglich, werden aber eher in Portalsystemen mit sehr langen Hüben eingesetzt.) Dies bedeutet, dass sie eine bessere Positionier- und Wiederholgenauigkeit als SCARA- und 6-Achsen-Roboter aufweisen können und dies auch oft tun. Kartesische Roboter haben auch einen Vorteil bei der Programmierung, da ihre Kinematik einfacher ist (drei kartesische Achsen anstelle mehrerer Rotationsachsen).
In der jüngeren Vergangenheit waren vormontierte kartesische Roboter selten, die meisten Einheiten wurden von einem OEM, einem Roboterintegrator oder sogar dem Endbenutzer individuell angefertigt. Heute jedoch bieten viele Hersteller von Linearaktuatoren vorkonfigurierte, vormontierte kartesische Systeme mit unzähligen Optionen an, die den gängigen Anforderungen an Verfahrweg, Nutzlast, Geschwindigkeit und Präzision entsprechen. Und auch die Hersteller traditioneller 6-achsiger und SCARA-Roboter steigen in das Geschäft ein, da sie erkannt haben, dass kartesische Roboter für viele industrielle Automatisierungs- und Montageanwendungen ein besseres Verhältnis zwischen Tragfähigkeit und Stellfläche bieten als SCARA- und 6-achsige Konstruktionen.