Dies ist eine automatisch generierte Übersetzung. Wenn Sie auf den englischen Originaltext zugreifen möchten,
klicken Sie hier
#Neues aus der Industrie
{{{sourceTextContent.title}}}
Wofür wird ein kartesischer Roboter verwendet? Anwendungen von Linearrobotern.
{{{sourceTextContent.subTitle}}}
Vorteile und Benachteiligungen.
{{{sourceTextContent.description}}}
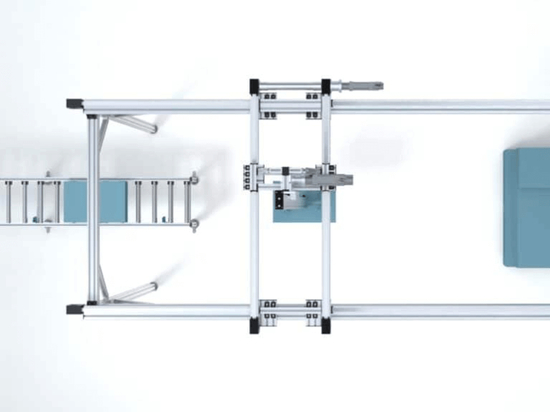
Numerisch gesteuerte Maschinen (CNC-Maschinen) und 3D-Druck sind zwei typische Anwendungen für kartesische Koordinatenroboter. Fräsmaschinen und Plotter nutzen die einfachste Anwendung, bei der sich ein Werkzeug, z. B. eine Fräse oder ein Stift, auf einer X-Y-Ebene bewegt und auf eine Oberfläche gehoben und gesenkt wird, um ein bestimmtes Muster zu erzeugen.
Die kartesische Koordinatenrobotik kann auch in Bestückungsautomaten eingesetzt werden. Kartesische Portalroboter werden z. B. zum Be- und Entladen von Bauteilen in CNC-Drehautomaten eingesetzt, die in drei Achsen (X, Y, Z) schwere Lasten mit hoher Geschwindigkeit und Präzision aufnehmen und platzieren.
Vorteile des kartesischen Roboters
1. Sie können aufgrund ihrer kompakten Bauweise und ihrer geradlinigen Bewegung schwere Nutzlasten bewegen.
2. Eine einzige Steuerung kann viele Roboter steuern und macht SPS-Lösungen oder IO zwischen mehreren Steuerungen überflüssig.
3. Sie können schwere Lasten über große Entfernungen transportieren, da sie lange Hübe von etwa 2 Metern haben.
4. Ihre Aktionen und Rollen sind exakt und wiederholbar.
5. Die Zykluszeiten werden durch ihre hohe Bewegungsgeschwindigkeit und Beschleunigung verkürzt.
6. Die Möglichkeit, 2 Einheiten auf die Z-Achse zu setzen, minimiert den Einbauraum.
7. Es kann mit praktisch jedem Linearantrieb und mehreren Antriebsmechanismen (zusammen mit Riemen, Spindel, Aktuator oder Linearmotor) gebaut werden.
8. Diese mechanische Struktur vereinfacht u.a. die Lösung des Robotersteuerarms und ist bei Arbeiten im 3D-Raum äußerst zuverlässig und präzise.
Kartesische Roboter Nachteile
1. Andererseits haben kartesische Roboter auch Nachteile: Sie benötigen viel Platz und können nicht unter Wasser arbeiten.
2. Wenn sie in einer gefährlichen Umgebung eingesetzt werden, benötigen diese Roboter außerdem einen besonderen Schutz. Ein weiterer Nachteil dieses Robotertyps ist, dass er in der Regel langsamer ist als die anderen.
3. Wenn die Luft schmutzig ist, ist es oft schwierig, Schmutz von den gleitenden Komponenten fernzuhalten.
4. Die Verwendung eines Brückenkrans oder anderer Materialtransportgeräte für den Zugang zum Arbeitsbereich kann verboten sein, und die Reparatur kann kompliziert sein.