Automatische Übersetzung anzeigen
Dies ist eine automatisch generierte Übersetzung. Wenn Sie auf den englischen Originaltext zugreifen möchten, klicken Sie hier
#Produkttrends
Was ist ein XYZ-Linearroboter?
Erläuterung, Anwendungen und Vorteile.
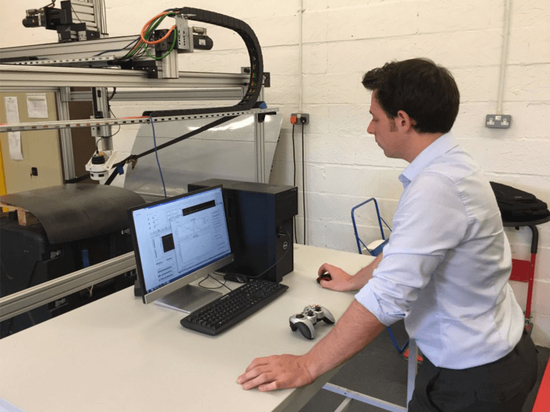
Der kartesische Koordinatenroboter wird auch als geradliniger Roboter oder X-Y-Z-Roboter der kugelförmigen Konfiguration bezeichnet, da er mit drei Gleitgelenken für den Zusammenbau der XYZ-Achsen ausgestattet ist. Die Armbewegung eines Roboters mit kartesischer Konfiguration kann durch drei sich schneidende, senkrechte Geraden beschrieben werden, die als X-, Y- und Z-Achse bezeichnet werden. In der kartesischen Koordinatenkonfiguration hat der Roboterarm folgende Bewegungen:
1. Lineare Bewegung, die dem Arm aufgrund eines linearen Gelenks einen vertikalen Auftrieb ermöglicht.
2. Zwei Gleitbewegungen, die aufgrund von zwei orthogonalen Gelenken senkrecht zueinander stehen.
Diese Konfiguration des Roboters wird in einem rechteckigen Arbeitsraum mittels dieser drei Gelenke Bewegung verarbeiten. Da die Bewegung des Arms entlang aller drei Achsen gleichzeitig starten und stoppen kann, ist die Bewegung der Werkzeugspitze gleichmäßiger. Dadurch kann sich der Roboter direkt zu seinem Zielpunkt bewegen, anstatt parallel zu den einzelnen Achsen verlaufenden Bahnen zu folgen.
Vorteile der kartesischen Roboterkonfiguration
Die kartesische Roboterkonfiguration hat folgende Vorteile:
1. Sie hat eine hohe Tragfähigkeit.
2. Sie bietet eine starre Struktur sowie ein hohes Maß an mechanischer Steifigkeit und Genauigkeit.
3. Es kann eine hohe Wiederholgenauigkeit mit geringstem Fehler und bei guter Geschwindigkeit produzieren.
Beschränkungen der kartesischen Roboterkonfiguration
Die kartesische Roboterkonfiguration hat folgende Einschränkungen:
1. Sie hat einen kleinen und rechteckigen Arbeitsbereich.
2. Sie hat eine eingeschränkte Flexibilität.
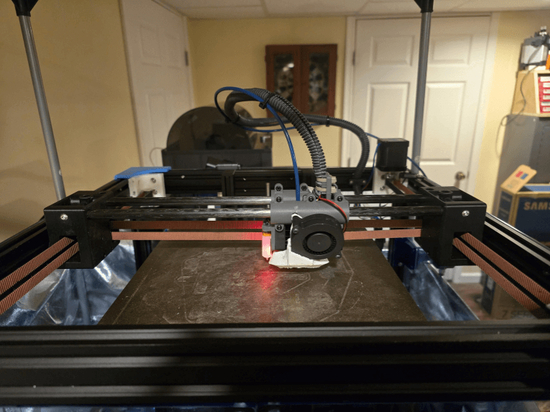
Anwendungen der kartesischen Roboterkonfiguration
Die kartesische Koordinatenkonfiguration findet Anwendung bei Inspektion, Montage, Bearbeitung, Schweißen, Endbearbeitung usw. Diese Konfiguration wird auch als Gantry-Roboter bezeichnet, da er mit Hilfe seiner starren Struktur hohe Lasten tragen kann und diese Tragfähigkeit an verschiedenen Stellen innerhalb des Arbeitsbereichs nicht variiert.