Automatische Übersetzung anzeigen
Dies ist eine automatisch generierte Übersetzung. Wenn Sie auf den englischen Originaltext zugreifen möchten, klicken Sie hier
#Produkttrends
Was sind Roboterportale?
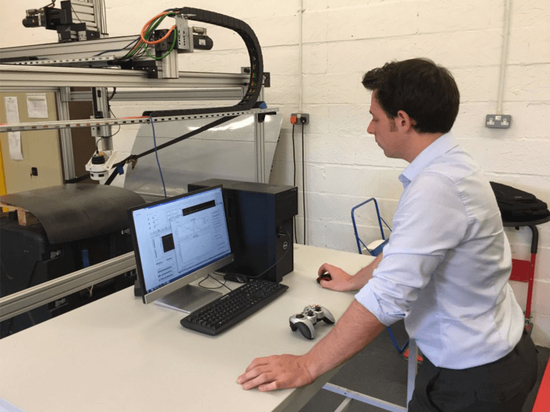
Komponenten des XYZ-Positionierungssystems.
Roboterportale sind leistungsstarke Werkzeuge in der modernen Fertigung und Automatisierung, die in einer Reihe von Anwendungen mehr Präzision, Flexibilität und Effizienz bieten.
Einführung
Bei einem Roboterportal handelt es sich um einen Industrieroboter mit einem Roboterarm, der an einem Hängeschienensystem oder Rahmen montiert ist. Die Portalkonstruktion besteht aus einer Reihe von Trägern oder Streben, die dem Roboter Stabilität und Präzision bei der Bewegung entlang der X-, Y- und Z-Achse verleihen. Roboterportale werden in der Regel in Anwendungen eingesetzt, bei denen schwere Nutzlasten angehoben und über große Arbeitsbereiche bewegt werden müssen. Die Roboter können für den Einsatz in verschiedenen Umgebungen konfiguriert werden, darunter Reinräume, gefährliche Umgebungen und andere Spezialanwendungen.
Komponenten des Roboterportals
Gantry-Robotersysteme bestehen aus mehreren Komponenten, die zusammenarbeiten, um präzise und genaue Bewegungen zu erzielen. Hier sind die Hauptkomponenten eines Roboterportals:
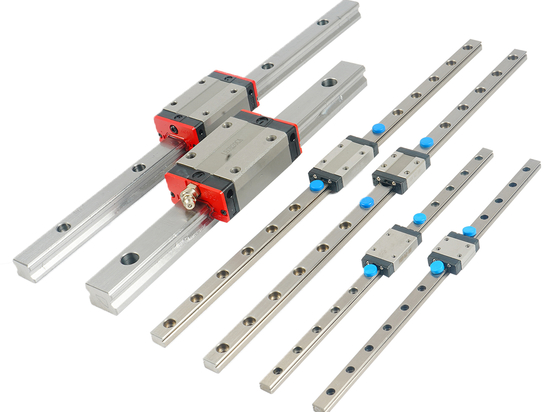
Gantry-Struktur
Die Gantry-Struktur ist der Rahmen, der den Roboterarm und das Endeffektor-Modul trägt. Sie besteht aus zwei oder mehr parallelen Trägern, die sich entlang der X- und Y-Achse bewegen, und einer vertikalen Säule, die sich entlang der Z-Achse bewegt. Die Struktur muss steif und stabil sein, um die Genauigkeit und Wiederholbarkeit der Bewegungen des Roboters zu gewährleisten.
Die Gantry-Struktur kann je nach den Anforderungen der Anwendung aus verschiedenen Materialien wie Aluminium, Stahl oder Kohlefaser bestehen. Das verwendete Material muss stark genug sein, um das Gewicht des Roboterarms und des Endeffektors zu tragen, und gleichzeitig leicht sein, um das Gesamtgewicht des Portals zu reduzieren.
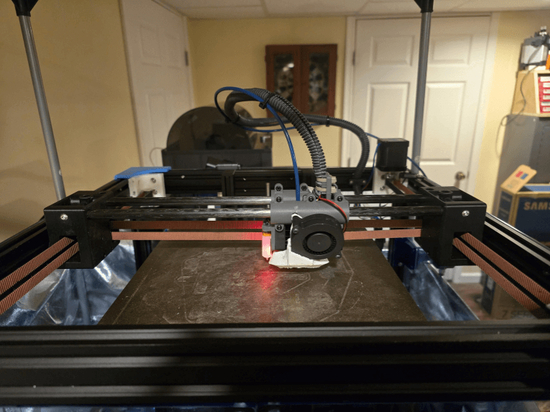
Roboterarm
Der Roboterarm ist ein Teil des Portals, der den Endeffektor hält und sich entlang der X-, Y- und Z-Achse bewegt. Das Design und die Spezifikationen des Roboterarms hängen von den Anforderungen der Anwendung ab, z. B. von der Reichweite, der Tragfähigkeit und der Geschwindigkeit.
Der Roboterarm kann mit verschiedenen Arten von Endeffektoren, wie Greifern, Saugnäpfen und Schweißzangen, ausgestattet werden, um bestimmte Aufgaben zu erfüllen.
Endeffektor
Der Endeffektor ist das Werkzeug oder Gerät, das am Roboterarm angebracht ist, um eine bestimmte Aufgabe zu erfüllen. Der Endeffektor kann ein Greifer, ein Saugnapf, eine Schweißpistole, ein Schneidwerkzeug oder ein anderes Gerät sein, das das zu bearbeitende Teil oder Material manipulieren kann.
Der Endeffektor muss so konstruiert sein, dass er den Anforderungen der Anwendung entspricht, z. B. der Form und Größe des Teils, dem Gewicht und dem zu bearbeitenden Material. Die Konstruktion des Endeffektors kann sich auch auf die Gesamtgenauigkeit und Wiederholbarkeit der Roboterbewegungen auswirken.
Antriebssystem
Das Antriebssystem besteht aus Motoren und Aktuatoren, die die Bewegung der Portalstruktur und des Roboterarms steuern. Je nach den Anforderungen der Anwendung kann das Antriebssystem entweder hydraulisch, pneumatisch oder elektrisch sein.
Die Spezifikationen des Antriebssystems hängen von den Anforderungen der Anwendung ab, wie Geschwindigkeit, Drehmoment und Präzision. Das Antriebssystem muss außerdem so konzipiert sein, dass es mit dem Steuerungssystem zusammenarbeitet, um genaue und präzise Bewegungen zu erzielen.
Steuersystem
Das Steuersystem ist das Gehirn des Roboterportals, das für die Steuerung der Bewegung der Portalstruktur und des Roboterarms verantwortlich ist.
Die Software des Steuerungssystems muss so programmiert werden, dass sie den Anforderungen der Anwendung entspricht, z. B. dem Bewegungsprofil, den Beschleunigungs- und Verzögerungsraten und der Bahnplanung. Das Steuerungssystem muss auch mit anderen Sensoren und Geräten integriert werden, um genaue und präzise Bewegungen zu erzielen.
Insgesamt müssen die Konstruktion und die Spezifikationen der einzelnen Komponenten eines Roboterportals sorgfältig durchdacht werden, um genaue und präzise Bewegungen zu erzielen und die Zuverlässigkeit und Effizienz des Portals bei der Erfüllung der vorgesehenen Aufgabe zu gewährleisten.