Automatische Übersetzung anzeigen
Dies ist eine automatisch generierte Übersetzung. Wenn Sie auf den englischen Originaltext zugreifen möchten, klicken Sie hier
#Produkttrends
{{{sourceTextContent.title}}}
CARTESIAN GANTRY ROBOTS - Lineares Positionierungssystem
{{{sourceTextContent.subTitle}}}
Vorteile und Anwendungen.
{{{sourceTextContent.description}}}
SCARA- und Knickarmroboter sind vielleicht die bekannteste Form von Robotern auf dem heutigen Markt, aber wenn es darum geht, große Aufgaben auf kleinstem Raum zu erledigen, sind Portalroboter die richtige Wahl.
Portalroboter, auch kartesische Roboter genannt, sind in der Automatisierung fast allgegenwärtig, werden aber noch nicht so schnell als ernstzunehmende Roboter angesehen. Aufgrund ihres einfachen Aufbaus, der geringen Kosten und der Skalierbarkeit sowie der unzähligen Motor- und Steuerungssoftwarelösungen ändert sich dies nun.
Vorteile kartesischer Portalroboter:
1. Mehrachsige Bewegung von fast beliebiger Länge
2. Skalierbar
3. Getriebe und Motor können je nach Bewegungsbereich und Geschwindigkeit dimensioniert werden
4. Geeignet für leichte bis schwere / hängende Lasten
5. Flexibel und effizient durch die Skalierbarkeit der Linearachsen
6. Kostengünstig
Kartesischer Gantry-Roboter Nachteile:
1. Kann die Reichweite nicht variieren, um Hindernisse herum oder in sie hinein
2. Linearschlitten, Riemenschienen sind nicht leicht gegen die Umwelt abzudichten
3. Nicht freistehend: Ständer oder Rahmen oder andere Befestigung erforderlich
Vorteile des Gantry-Systems:
Gantry-Roboter können einen gesamten kubischen Arbeitsraum von 96 % ihres Platzes und ihrer Größe nutzen. Ein kartesischer Roboter hat drei Achsen. Wie ihr Namensvetter und bekannterer großer Cousin, der Portalkran, sind sie in der Regel an einem X- oder X/Y-Achsenträger an einer starren Struktur aufgehängt. Die Koordinaten der drei Achsen sind in der Regel als X, Y und Z definiert. Jede Achse ist im rechten Winkel angeordnet, um drei Bewegungsgrade zu ermöglichen. Portale zeichnen sich außerdem dadurch aus, dass sie an beiden Enden oder durch ein zweites Element unterstützt werden. Im Gegensatz zu armartigen Robotern lassen sich Portale in allen drei Achsen problemlos auf größere Proportionen skalieren. Portalroboter eignen sich besonders für Anwendungen, bei denen zusätzliche Orientierungsanforderungen minimal sind oder bei denen die Teile bereitgestellt werden können, bevor der Roboter sie aufnimmt.
Sowohl kartesische als auch Portalroboter haben einen rechteckigen oder kubischen Arbeitsbereich, im Gegensatz zu Knickarmrobotern, die wie die Gelenke eines menschlichen Arms Grenzen für jede Bewegung und einen bestimmten bogenförmigen Bewegungsumfang haben. Ihre Spezifikationen werden in Form von Bewegungsgraden mit großen, geschwungenen Bögen dargestellt, wobei die positiven und negativen Bewegungsgrade um den Mittelpunkt der Basis und das Lager der einzelnen Achsen rotieren. Interessant ist, dass der Arbeitsraum selbst oft an diese ungewöhnlichen Arbeitsbereiche angepasst werden muss, während sich der Roboter nicht an den Arbeitsraum anpasst.
Aufgrund ihrer starren, leichten Struktur sind kartesische/portalförmige Roboter sehr genau und wiederholbar. Aufgrund ihrer einfachen Struktur sind Portalroboter intuitiv zu programmieren und bei der Evaluierung neuer Automatisierungslösungen leicht zu visualisieren. Vor allem aber sind Portalroboter konfigurierbar. Von einer Vielzahl von Motoren und Getrieben bis hin zu Komponenten und Materialien sind diese Roboter auf die Herausforderungen feuchter, gefährlicher und schmutziger Umgebungen vorbereitet.
Der kartesische Koordinatenroboter ist aufgrund seines relativ einfachen Aufbaus und seiner unkomplizierten Bedienung in der Fertigung sehr gefragt. Da die einzelnen Achsen leicht ausgetauscht werden können, werden die Ausfallzeiten reduziert und die Wartungskosten auf ein Minimum beschränkt. Darüber hinaus kann das gesamte System in seine Einzelteile zerlegt werden, um es in mehreren Einzelachsanwendungen einzusetzen. Am wichtigsten ist, dass diese Systeme im Vergleich zu anderen, komplexeren Robotern kostengünstig sind.
Gantry-System-Anwendungen:
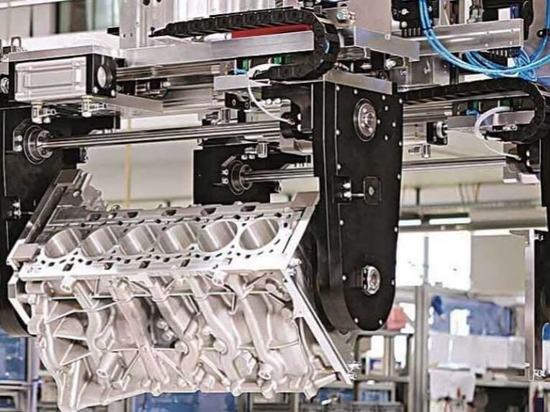
Bei Gantry-Robotern befinden sich alle Achsen oberhalb des Arbeitsbereichs, was sie ideal für Überkopf-Arbeitsprozesse macht. Gantry-Roboter können zum Halten und Positionieren einer Vielzahl von Endeffektoren verwendet werden, wie z. B. in:
Montage
Dosieren & Füllen
Befestigen und Schrauben
Fliegende Messer
Kamerapositionierung & Scannen
Schneiden - Laser & Wasserstrahl
Allgemeine Automatisierung
Indizierung & Sortierung
Inspektion
Be- und Entladen
Materialhandhabung
Verpacken, Palettieren und Vereinzeln
Pick & Place Systeme
Drucken und Plotten
Produktlifte, Hebebühnen und Aufzüge
Sprühen
Automatisierung von Theateraufführungen
Video-Produktion
Schweißen
Es wird behauptet, dass der Portalroboter das wahre Arbeitspferd der modernen Industrie ist. Denken Sie darüber nach... Millionen von Portalrobotern wurden in schlüsselfertige Maschinen verpackt und verkauft, wie z. B. für die Montage von elektronischen Komponenten und Roboter-Bestückungssystemen. Auch heute noch sind lineare X-Y-Z-Portale aufgrund ihrer Genauigkeit und Steifigkeit die Hauptstütze der Koordinatenmessungsindustrie für Werkzeugmaschinen. Diese Art von Robotern eignet sich besonders für Anwendungen, bei denen die zusätzlichen Orientierungsanforderungen minimal sind oder bei denen die Teile bereitgestellt werden können, bevor der Roboter sie aufnimmt.
Der oft übersehene kartesische Portalroboter ist ein integraler Bestandteil der modernen Automatisierungsindustrie und sollte aufgrund seiner Flexibilität, Effizienz und einfachen Implementierung immer für eine neue Automatisierung in Betracht gezogen werden.