Automatische Übersetzung anzeigen
Dies ist eine automatisch generierte Übersetzung. Wenn Sie auf den englischen Originaltext zugreifen möchten, klicken Sie hier
#Neues aus der Industrie
{{{sourceTextContent.title}}}
Klassifikations- und Kernkomponenten des kartesischen beigeordneten Roboters
{{{sourceTextContent.subTitle}}}
Positionierung, Antrieb, Steuerung und Terminalsystem
{{{sourceTextContent.description}}}
Die rechteckigen Koordinaten der Klassifikation des Roboters:
1, entsprechend dem Gebrauch von Punkten: schweißende Roboter, Palettierungsroboter, Roboter des Klebers (Zuführen), Roboter der Entdeckung (Überwachung), (Klassifikations) Roboter, Montageroboter, EOD-Roboter, medizinische Roboter, spezielle Roboter, etc. sortierend.
2, entsprechend den strukturellen Formpunkten: an der Wand befestigter (Kragbalken) Roboter, Portalroboter, umgedrehter Roboter und anderer typischer rechteckiger Roboter.
3, entsprechend Freiheitsgraden: Zweikoordinatenroboter, Dreikoordinatenroboter, Vierkoordinatenroboter, Fünfkoordinatenroboter, Sechskoordinatenroboter.
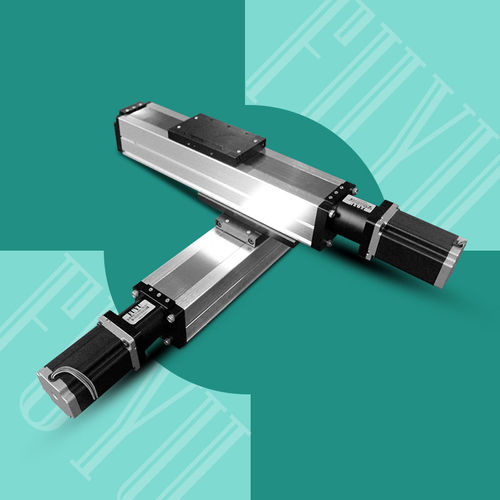
Kartesische beigeordnete Roboterkernkomponenten - lineare Positionierungseinheit, zwecks die Kosten von kartesischen Robotern zu verringern, die ProduktProgrammentwicklungszeit, die Zunahmeproduktzuverlässigkeit, Produktleistung, in vielen Ländern in Europa zu verbessern und das Amerika zu verkürzen sind der rechteckige beigeordnete Roboter gewesen, der modular ist, das lineare, Einheit (System) in Position bringend ist das typischste Produkt der Modularisierung.
Eine komplette Positionierungseinheit (System) besteht aus einigen Teilen
1, Körperprofil in Position bringend: Da das Befestigungsstützteil der Bahn, dieses Profil zu dem allgemeinen Rahmenprofil unterschiedlich ist, erfordert es eine sehr hohe Gradlinigkeit, Flachheit.
2, Bewegungsbahn: installiert auf das Positionierungskörperprofil, stützen Sie direkt die Bewegung des Schiebers. Ein Positionierungskörper, den Profil möglicherweise (System) mit einer Bewegungsbahn oder ihm installiert ist, ist mit einer Mehrzahl von Bewegungsbahnen installiert möglicherweise. Die Eigenschaften und die Quantität der Bahn direkt die mechanischen Eigenschaften der Positionierungseinheit (System) beeinflussen. Die Arten von Bahnen, die die Navigationsanlage bilden, sind sehr allgemein. Es gibt lineare Kugellager und gerade zylinderförmige Stahllager.
3, Bewegungsschieber: besteht aus der LastsMontageplatte und trägt Rahmen, Rollengruppe (Ballgruppe), Staubbürste, Schmierungshohlraum, Dichtungsabdeckung. Die Bewegungsschieber werden mit den Schienen durch Rollen oder Bälle verbunden. Erzielen Sie die Anleitung des Sports.
4, Getriebekomponenten: Allgemeine Getriebekomponenten sind synchroner Gurt, Zahnriemen, Schraube/Kugelumlaufspindel, Gestell, Linearmotor und so weiter.
7, Sitz tragend und tragen: verwendet, um das Übertragungselement- und Antriebselement zu installieren.
Kartesische beigeordnete Roboter-Antriebs-Elemente - Motorantrieb-System die lineare Positionierungseinheit (System) ist in der Lage, die genaue in Position bringende Bewegung zu erzielen, die durch das Motorantriebsystem bestimmt wird.
Allgemein verwendete Ansteuersysteme sind:
AC-/branchservomotorantriebsystem, SchrittmotorAnsteuersystem, linearer Servomotor/lineares SchrittmotorAnsteuersystem. Jedes Ansteuersystem besteht einem Motor und aus einem Fahrer. Die Funktion des Fahrers ist, das schwache Signal zu verstärken und es auf dem starken Elektromotor zu laden, um den Motor zu fahren. Der Motor wandelt elektrische Signale um, Geschwindigkeit und eckige Verschiebung zu präzisieren.
In den Gelegenheiten, die hohe Dynamik erfordern, wird Hochgeschwindigkeitsoperation, starker Antrieb und andere Gelegenheiten, AC-/branchservobewegungssystem als der Antrieb verwendet; in den Anforderungen der niedrigen Dynamik, können langsame Operation, Niederleistungs-Antrieb und andere Gelegenheiten, Schrittmotorsystem als der Antrieb verwendet werden; Sehr hohe Dynamik, Hochgeschwindigkeitsoperation, hohe Positionierungsgenauigkeit und andere Gelegenheiten benutzen linearen Servo-Antrieb.
Kartesische beigeordnete Robotersteuerung, zwecks die flexible und mannigfaltige Bewegungsfunktion des Roboters und schnelles Warteverarbeitungsfunktion zu verwirklichen, der Roboter muss ein Gehirnsteuerungssystem haben.
Die Funktion des Kontrollsystems ist, Bewegungsanweisungen, Prozessdaten herauszugeben, bestimmen Bewegung, etc. Sie kann Steueranweisungen herausgeben, Rückkopplungssignale zu empfangen und bestimmt die Verarbeitungsinformationen jederzeit entsprechend dem nummerierten Programm.
Abhängig von der Arbeitssituation kann das Kontrollsystem viele verschiedenen Gestalten annehmen:
1. Kombination von IPC und von BewegungsSteuerkarte: Die BewegungsSteuerkarte borgt Computerbetriebsmittel und verwendet seine eigene Bewegungskontrollfunktion, um Steuerung zu erzielen.
2, OfflinebewegungsSteuerkarte: Borgen Sie den Computer, um das Programm zu machen, kann das Programm selbst, Lauf off-line speichern.
3, PLC - borgen Sie einen Computer, um ein Programm zu kompilieren, das Programm kann gespeichert werden, Lauf off-line.
4, engagierter Prüfer.
Mit dem, das vom Kontrollsystem nett ist, wählt der Bewegungssteueringenieur entsprechend der tatsächlichen Situation abhängig von der Situation des Sports und der Nutzungsbedingungen.
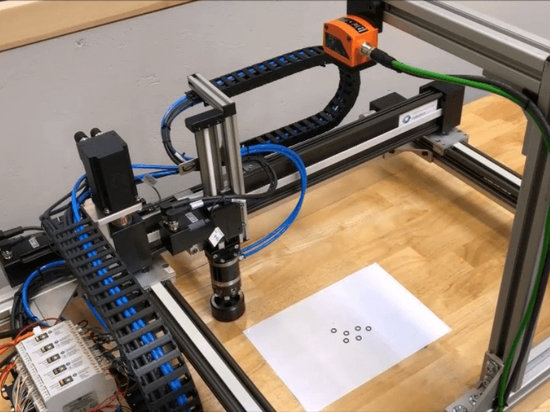
Kartesische RoboterEndgeräte - funktionierende kartesische Koordinaten der Werkzeuge die Endgeräte des Roboters sollten unterschiedliches verwenden, können mit einer Vielzahl von funktionierenden Werkzeugen ausgerüstet werden:
Zum Beispiel ist ein Terminaloperationswerkzeug des schweißenden Roboters ein Brennschneider: ein Palettierungsroboterterminaloperationswerkzeug ist ein Greifer; ein Roboterterminaloperationswerkzeug des Klebers (Zuführen) ist eine Leimpistole, ist ein Roboterterminaloperationswerkzeug der Entdeckung (Überwachung) eine Kamera oder ein Laser.
Einige Arbeit-intensive Aufgaben können nicht mit einem einzelnen funktionierenden Werkzeug abgeschlossen werden. Es ist notwendig, zwei oder zu installieren funktionierende Werkzeuge. Zum Beispiel zusätzlich zum Bedarf an einem mechanischen Greifer, wird eine Kamera auch für die Gefangennahme eines nicht stationären beweglichen Gegenstandes angefordert, der ständig die räumliche Position des berechneten Gegenstandes aufspürt.