Automatische Übersetzung anzeigen
Dies ist eine automatisch generierte Übersetzung. Wenn Sie auf den englischen Originaltext zugreifen möchten, klicken Sie hier
#Neues aus der Industrie
{{{sourceTextContent.title}}}
Wann benötigen Sie einen Portalroboter?
{{{sourceTextContent.subTitle}}}
Geschichte der industrieller Automation
{{{sourceTextContent.description}}}
Wenn Sie an einen Industrieroboter denken, kommt was sich zu kümmern?
Vermutlich etwas Ähnliches Bildshows…
Gegliederte Roboter wie diese werden überall, dank Autofirmenwerbungen und Robotertanzreihenfolgen anerkannt. Roboter SCARA (selektive Befolgung gegliederter Roboter-Arm) liegen auch an ihrer Annahme und an starken Verbreitung in den Fabriken seit den frühen achtziger Jahren unbestrittenes. Beide – gegliederte und SCARA-Roboter – kombinieren Sie lineare und Drehbewegung, mit dem Ergebnis der Manövrierbarkeit für komplexe Aufgaben. Gegliederte Roboter sind dem menschlichen Arm analog, mit sechs Äxten Bewegung – drei Übersetzungs (linear) und drei Rotations (denken Sie an Ihre Schulter, Ellbogen und Handgelenk). SCARA-Roboter haben vier Äxte Bewegung – X, Y, Z und Theta (ein wenig wie Ihr Arm, wenn Ihre Schulter stillgestellt wurden).
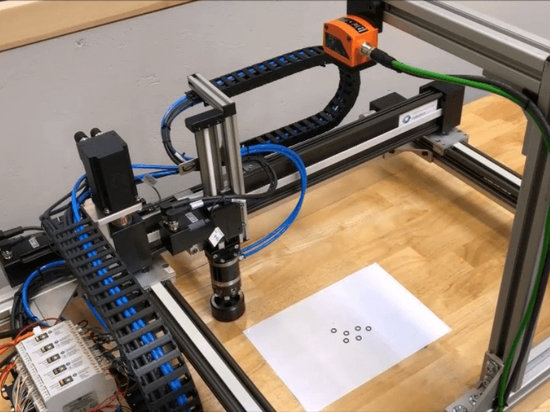
In den industriellen Anwendungen, die vom Verpacken bis zu Halbleiterherstellung, sind kartesische reichen, Roboter weniger überwiegend in der Volkskultur, aber überall vorhanden. Während ihr Name bedeutet, funktionieren diese Roboter in den drei kartesischen Äxten – X, Y und, Z – obgleich sie eine Thetaachse für Ende-vonarmwerkzeugausstattung einschließen können. Während weniger „sexy“ als die gegliederte und SCARA-Roboter, kartesische Roboter, mit höheren Tragfähigkeiten für ihre Größe und in vielen Fällen viel vielseitiger sind, bessere Präzision. Sie sind auch in hohem Grade anwendbar, da die Äxte mit relativ weniger Rekonfiguration verbessert werden oder geändert werden können, um entwickelnden Produkt- oder Anwendungsanforderungen zu entsprechen.
Kartesische Roboter jedoch werden durch ihren in sich selbst freitragenden Entwurf begrenzt, der ihre Tragfähigkeit begrenzt. Dieses ist wenn das äußerste besonders wahr (Y oder Z) Achse hat eine lange Hublänge und verursacht eine große Momentlast auf den Unterstützungsäxten. In den Fällen wo lange Anschläge und hohe Lasten angefordert werden, ist ein Portalroboter die beste Lösung.
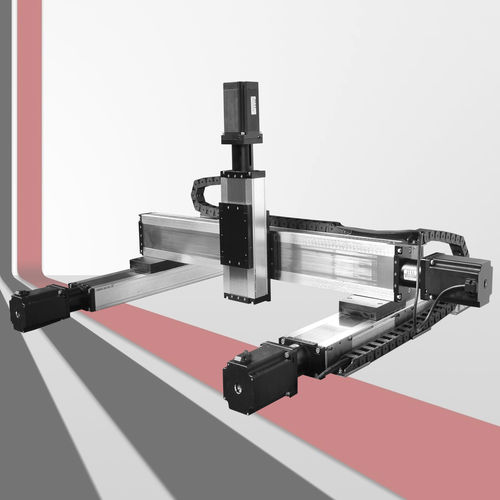
Von kartesischem zum Bock:
Ein Portalroboter ist eine geänderte Art des kartesischen Roboters, unter Verwendung zwei Äxte X (oder Basis) eher als die einzelne niedrige Achse, die in Cartesians gefunden wird. Die zusätzliche x-Achse (und manchmal zusätzliche y- und z-Äxte) lässt den Roboter größere Lasten und Kräfte behandeln und macht sie ideal für Auswahl und Ort von schweren Nutzlasten oder von Teilbe- und entladung. Jede Achse basiert auf einem Linear-Verstellgerät, ob es ein „selbst gemachter“ Auslöser ist, der durch das Soem oder den Integrator zusammengebaut wird, oder einem vormontierten Auslöser von einer Firma der linearen Bewegung. Dies heißt, dass es die fast grenzenlosen Wahlen gibt, zum jede mögliche Kombination von hohen Geschwindigkeiten, von langen Anschlägen, von schweren Nutzlasten und von hoher Positionierungsgenauigkeit zuzulassen. Spezielle Anforderungen für raue Umwelt oder lärmarme werden leicht und wenn die Anwendung simultane aber unabhängige Prozesse erfordert, um stattzufinden, die horizontalen Äxte können mit Linearmotoren unter Verwendung der mehrfachen Wagen errichtet werden enthalten.
Portalroboter werden gewöhnlich über den Arbeitsbereich (folglich der allgemeine Ausdruck, „der obenliegende Bock "), aber angebracht, wenn das Teil nicht für die Behandlung von oben, wie es der Fall ist bei Solarzellen und Modulen, der Bock passend ist, können konfiguriert sein, um von unterhalb des Faches zu arbeiten. Und während Portalroboter gewöhnlich für sehr Großsysteme gehalten werden, sind sie auch für die kleineren, sogar Desktop-groß Maschinen passend. Weil ein Portalroboter zwei X oder Basis, Äxte, die Momentlast, die durch die y- und z-Äxte dargestellt werden, sowie die Arbeitsnutzlast hat, werden als Kräfte auf den Äxten X gelöst. Dieses erhöht erheblich die Steifheit des Systems und lässt in den meisten Fällen die Äxte längere Hublängen und höhere Geschwindigkeiten als ein ähnlicher kartesischer Roboter haben.
Wenn es zwei Äxte parallel gibt, ist es für nur eine von, allgemein um durch den Motor angetrieben ihnen, Binden zu verhindern, der aus Bewegung Aus-vonsynchronisierung zwischen den zwei etwas resultieren könnte. Anstatt, beide Äxte zu fahren benutzt, wird eine Verbindungswelle oder ein Drehmomentrohr, um Leistungsstärke auf die zweite Achse zu übertragen. Und in einigen Fällen, kann die zweite Achse ein „Leerlauf“ oder der Nachfolger sein und einem linearen Führer, um Unterstützung für die Last zu gewähren, aber aus keinem Antriebsmechnismus bestehen. Die Entscheidung von, ob und wie man die zweite Achse abhängt vom Abstand zwischen den zwei Äxten, der Rate der Beschleunigung und der Steifheit der Verbindung zwischen ihnen fährt. Das Fahren nur ein in einem Paar Äxten verringert auch Kosten und Komplexität des Systems.
Ein kartesisches oder einen Portalroboter zu sortieren ist schwieriger als, ein SCARA oder einen gegliederten Roboter (die sortierend gewöhnlich mit drei Parametern spezifiziert werden: Reichweite, Geschwindigkeit und Genauigkeit), aber Hersteller haben den Prozess einfacher in den letzten Jahren gemacht, indem sie vorkonfigurierte Systeme und on-line-Werkzeuge, wie Rexroths EasySelect-Configurator oder des 3D des Adepten linearer Modul-Erbauer einführten. Diese Werkzeuge erlauben dem Benutzer, die Orientierung und die Größe der Äxte, auch ein grundlegender Anschlag, eine Last und Geschwindigkeitsparameter zu spezifizieren. Herunterladbare CAD-Dateien sind auch ein Standard, der von den kartesischen und Portalroboterherstellern anbietet und machen sie einfach, in einen Entwurfs- oder Arbeitsflussplan, ganz wie SCARA und gegliederte Roboter zu integrieren. Während gegliederte und SCARA-Roboter leicht erkannt werden und kartesische Roboter weit eingesetzt werden, überwindt der Bockentwurf ihre inhärenten Beschränkungen in der Last, in der Geschwindigkeit, in der Reichweite und in der Wiederholbarkeit, mit einem nicht angepassten Niveau der Kundenbezogenheit und der Flexibilität. In einem Wort bieten Portalroboter die beste Kombination der Nutzlast und des Anschlags an.