Automatische Übersetzung anzeigen
Dies ist eine automatisch generierte Übersetzung. Wenn Sie auf den englischen Originaltext zugreifen möchten, klicken Sie hier
#Produkttrends
{{{sourceTextContent.title}}}
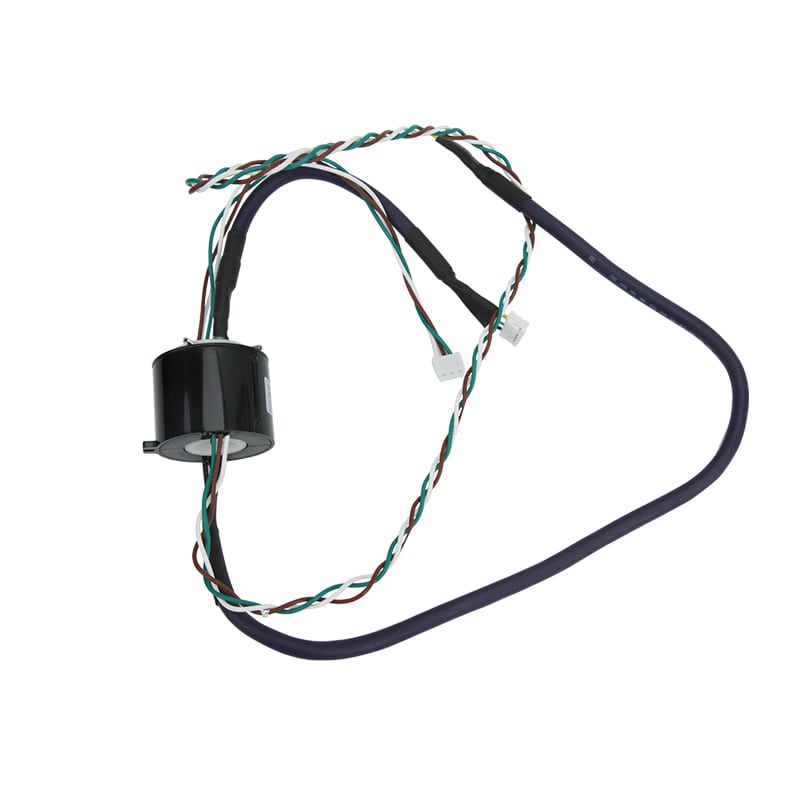
Technische Details des kundenspezifischen Schleifrings für Roboter
{{{sourceTextContent.subTitle}}}
Technische Details des kundenspezifischen Schleifrings für Roboter
{{{sourceTextContent.description}}}
Wir haben festgestellt, dass die RoboMaster-Teams immer noch eine große Nachfrage nach kundenspezifischen Schleifringen haben. Daher werden wir hier die technischen Details der Hohlwelle und des Kapselschleifrings im Detail vorstellen.
Lassen Sie uns zunächst einen Blick auf die Anpassung des Hohlwellen-Schleifringsignals werfen. Aufgrund der begrenzten technischen Eigenschaften gibt es ein Signal, das in einem Hohlwellenschleifring nicht übertragen werden kann, nämlich das USB3.0-Signal. Derzeit können nur die Kapselschleifringe USB3.0-Signale integrieren. Der Hohlwellenschleifring kann jedoch die Übertragung von USB 2.0-Signalen unterstützen. Laut dem von JINPAT zur Verfügung gestellten Produktkoffer für die teilnehmenden Roboter beträgt der maximal erforderliche Hohlwellenschleifring für jedes Team derzeit 60 mm. Bei dieser Öffnung können auch USB2.0-Signale übertragen werden.
Aufgrund der unterschiedlichen technischen Wege, die von den Teams eingeschlagen werden, müssen einige Roboterdesigns die Übertragung von Hochgeschwindigkeitssignalen unterstützen und gleichzeitig einige gewöhnliche Signalpfade integrieren und benötigen in der Regel 6-12 10A Stromleitungen für die Stromversorgung. Wenn die Öffnung des gewählten Schleifrings eine bestimmte Größe erreicht, führt die Integration so vieler Pfade unweigerlich zu einer sehr großen Höhe des Schleifrings. Daher lohnt sich das Hinzufügen von Hochgeschwindigkeitssignalpfaden oft nicht.
Wenn diese Art von Schema nicht aufgegeben werden kann, ist die Integration von Gigabit-Ethernet in einen Schleifring mit Durchgangsbohrung die kostengünstigste Wahl, da es von allen Hochgeschwindigkeitssignalen die wenigsten internen Schleifen belegt. Die Produktinformation der Schleifringindustrie ist bereits sehr transparent. Die von den verschiedenen Herstellern angebotenen Produkthöhen sind im Wesentlichen gleich, so dass jedes Team bei der Entwicklung die Kompromisse zwischen den Signalpfaden im Voraus berücksichtigen muss.
In den Schleifringen von Hero Robotern oder Sentinel Robotern ist das am häufigsten verwendete Signal immer noch das CAN-BUS-Signal, weil es auch ein Differenzialsignal ist, und einige Leute bevorzugen die Verwendung von Differenzial-CAN, um Signale auszudrücken. Da JINPAT eine riesige Jahresproduktion von Maschinen hat, ist auch der jährliche Verbrauch von CAN-Signalen sehr hoch. Wenn Kunden Differenzsignale benötigen, verwenden sie im Allgemeinen keine CAN-Signalleitungen, sondern gewöhnliche verdrillte oder abgeschirmte Zweidrahtleitungen. Daher ist es bei der Anpassung des Schleifringsignals für Wettbewerbsroboter notwendig, in der Kommunikation zwischen Kunden und Herstellern CAN-Signal und nicht differentielles CAN-Signal zu sagen, da sonst der Ingenieur eine Leitung des CAN-Signals integriert und eine Leitung des differentiellen Signals zum Produkt hinzufügt.



