Zu meinen Favoriten hinzufügen
Automatische Übersetzung anzeigen
Dies ist eine automatisch generierte Übersetzung. Wenn Sie auf den englischen Originaltext zugreifen möchten,
klicken Sie hier
#Produkttrends
{{{sourceTextContent.title}}}
Roboterzellen für die Steuerung von Rotationskörpern
{{{sourceTextContent.subTitle}}}
Roboterzellen für die Steuerung von Rotationskörpern
{{{sourceTextContent.description}}}
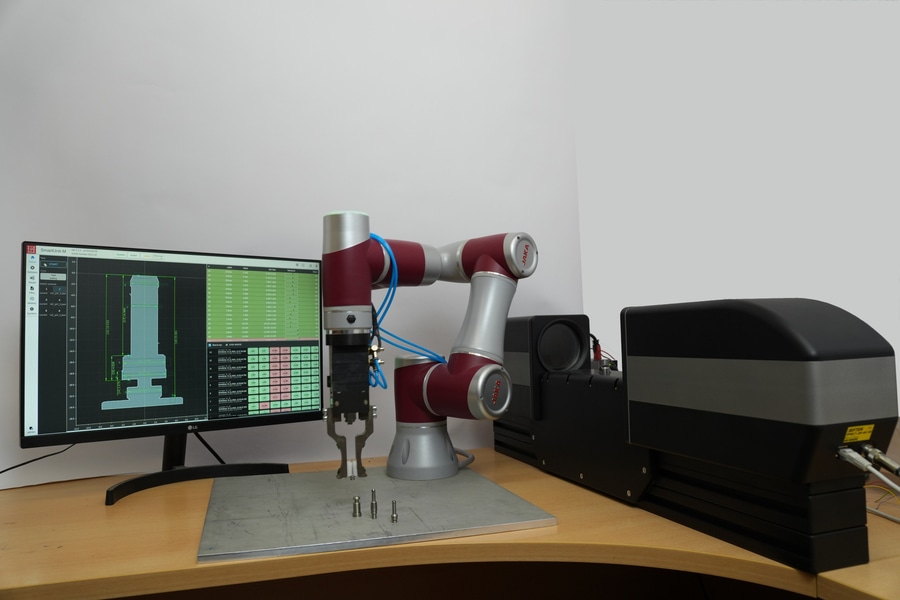
Die Roboterzellen sind für die hochpräzise Messung geometrischer Parameter (Durchmesser, lineare Abmessungen, Fasen, Rundlauf, Ausrichtung usw.) verschiedener Rotationskörper konzipiert.
Das Herzstück der Zelle ist das optische 2D-Mikrometer der Serie RF657.2D, das den gesamten Messprozess steuert. Die Messschraube ist mit einem Drehtisch mit Vakuumklemme ausgestattet, auf den der Roboter das zu prüfende Teil setzt.
Für die Umsetzung des Projekts haben wir die Funktionalität des Mikrometers erheblich erweitert. Die folgenden Smart-Blöcke wurden der Software der Messschraube hinzugefügt:
- CiA 402 Motor" ist eine Schrittmotortreiber-Steuereinheit, die dem CiA 402-Protokoll und der EtherCAT-Schnittstelle entspricht. Er ist für die Steuerung von Drehtischen und/oder linearen Teilezuführungssystemen konzipiert;
- OPC UA" ist ein Baustein, der den Serverteil des Industrieprotokolls OPC UA für den bidirektionalen Datenaustausch zwischen externen Client-Systemen (SCADA, MES) und internen Blöcken der Rechenschaltung implementiert;
- S7-Client" ist ein Baustein, der den Client-Teil des Industrieprotokolls S7 für den bidirektionalen Datenaustausch zwischen externen Siemens-Steuerungen (S7-300/400/1200/1500) und dem internen Rechenkreis implementiert;
- "Classifier" ist ein Baustein zur automatischen Erkennung des Werkstücktyps anhand des Eingangsprofils oder der Eingangskontur. Die Klassifizierung erfolgt anhand von Parametern, die in einer JSON-Datei angegeben sind, woraufhin das Programm automatisch den geeigneten Algorithmus zur Teilemessung auswählt;
- Runout & Concentricity" ist ein Block zur automatischen Messung des Rundlaufs, des Gesamtrundlaufs und der Koaxialität (Konzentrizität) eines Teileprofils in Bezug auf eine vorgegebene Referenzfläche. Die Messungen werden durchgeführt, während sich das Teil dreht.
Das Verfahren zur Programmierung eines Messalgorithmus, das auf der Verwendung vorgefertigter Smart Blocks basiert, ermöglicht somit die schnelle Erstellung einer praktisch unbegrenzten Anzahl von Messfunktionen, die Messung von Produkten unterschiedlicher Komplexität und die Automatisierung von Messungen durch die Organisation der Interaktion mit Robotern und Kontrollsystemen.