#Produkttrends
Warum das Gelenkmodul das „Kraftzentrum“ des Roboters genannt wird
Robotergelenke sind eine der grundlegendsten Komponenten, die die mechanische Struktur des Roboters bilden.
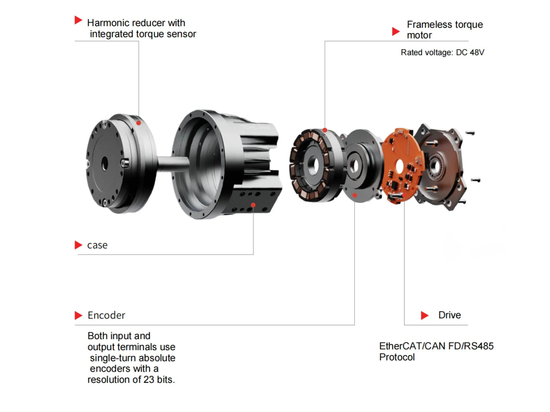
Zusammensetzung und Funktion des Gelenkmoduls
Magnetoelektrischer Encoder:
Der Hauptteil besteht aus einer Lesekopfplatine und einem Magnetgitter. Das Magnetgitter ist mit kleinen Magnetpolen graviert, und der Sensor erkennt Änderungen des Magnetfelds, wenn sich die Scheibe dreht.
Der Chip der Lesekopfplatine kann ein Hall-Effekt-Bauteil sein, das Spannungsänderungen erfasst, oder ein magnetoresistives Bauteil, das Änderungen des Magnetfelds erkennt.
Das Signal wird multipliziert, geteilt oder interpoliert, um die erforderliche Ausgangsgröße zu erzeugen und die Messung zu ermöglichen.
Photoelektrischer Encoder:
Er besteht aus einer Lichtquelle, einer optischen Codierscheibe und einem fotoempfindlichen Element.
Die Codierscheibe ist mit transparenten und undurchsichtigen Linien graviert. Der Lichtstrom, der auf das fotoempfindliche Element fällt, ändert sich synchron mit den transparenten Linien.
Das Ausgangssignal des fotoempfindlichen Elements wird in ein Pulssignal umgewandelt – ein Puls pro Umdrehung.
Anhand der Pulsänderungen kann die Verschiebung genau gemessen und gesteuert werden, um die aktuelle Geschwindigkeit des Systems widerzuspiegeln.
Inkremental-Encoder:
Der Inkremental-Encoder nutzt direkt das Prinzip der fotoelektrischen Umwandlung und gibt drei Sätze von Rechteckimpulsen A, B und Z aus.
Die Phasendifferenz zwischen A- und B-Signal beträgt 90°, wodurch die Drehrichtung bestimmt werden kann. Die Z-Phase erzeugt pro Umdrehung einen Impuls und dient zur Referenzpunktpositionierung.
Vorteile: einfache Struktur, lange Lebensdauer, starke Störfestigkeit, hohe Zuverlässigkeit, geeignet für Langstreckenübertragung.
Nachteil: Er kann keine absoluten Positionsinformationen der Wellenrotation liefern.
Absolut-Encoder:
Der Absolut-Encoder ist ein Sensor, der digitale Daten direkt ausgibt. Auf seiner kreisförmigen Codierscheibe befinden sich mehrere konzentrische Spuren, die aus lichtdurchlässigen und lichtundurchlässigen Segmenten bestehen.
Die Anzahl der Segmente verdoppelt sich von Spur zu Spur, und die Anzahl der Spuren entspricht der Bitanzahl der Binärdaten.
Auf der einen Seite der Scheibe befindet sich eine Lichtquelle, auf der anderen Seite fotoempfindliche Elemente.
Je nach Position erzeugen diese Elemente ein eindeutiges binäres Signal, das die aktuelle Wellenposition darstellt.
Er benötigt keinen Zähler und liefert an jeder Position einen festen digitalen Code. Je mehr Spuren, desto höher die Genauigkeit.
Gleichstromantrieb und Temperatursensor:
Der DC-Antrieb kann die Motorspannung ändern, um die Drehgeschwindigkeit des bürstenlosen Gleichstrommotors zu steuern.
Der Temperatursensor erfasst die Temperatur und wandelt sie in ein nutzbares Ausgangssignal um (Temperaturrückmeldung).