#Produkttrends
Linearantriebe vs. Rotationsantriebe: Die zentrale Wahl für humanoide Robotergelenke
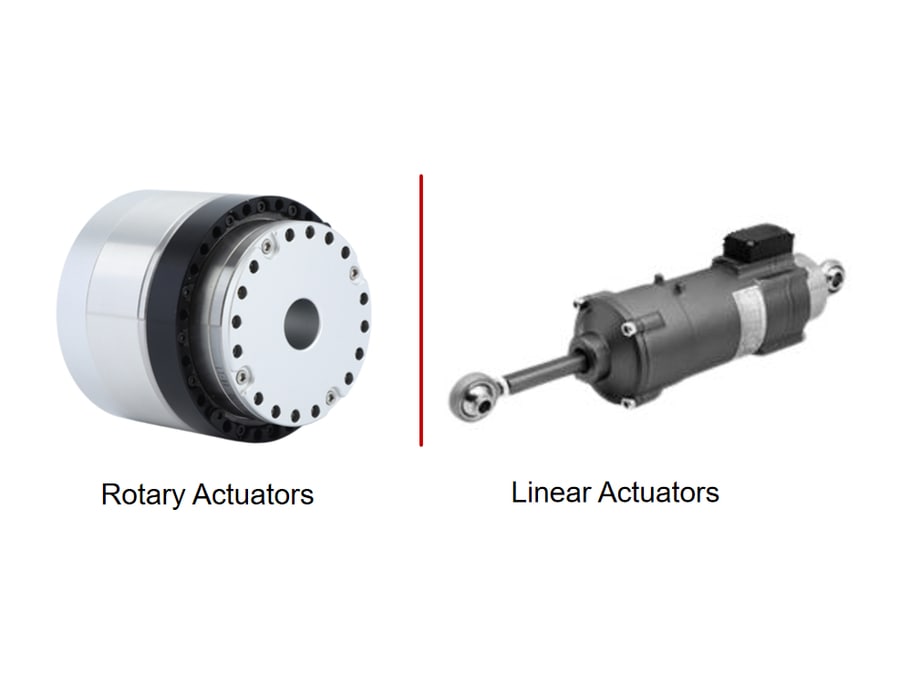
Humanoide Roboter-Gelenkmodule lassen sich grob in Rotations- und Linearantriebe unterteilen, wobei jede Art für bestimmte Anwendungen und Lastanforderungen geeignet ist.
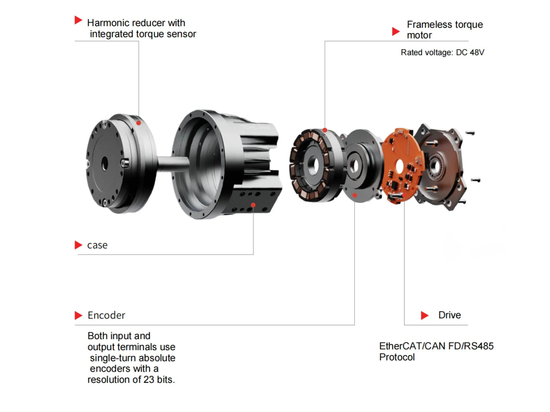
Rotationsantriebe, häufig mit Harmonic Drives, Planeten- oder Zyklodial-Reduzierern, bieten hohes Drehmoment, große Rotationswinkel, starke dynamische Leistung und hohe Integration, was sie ideal für Schulter-, Hüft- und Taillengelenke macht. Linearantriebe, die Planeten-Rollschrauben oder Kugelgewindetriebe verwenden, wandeln Drehbewegung in Linearbewegung um und zeichnen sich durch Präzision und Steifigkeit in Gelenken mit kleinen Bewegungsbereichen aus, wie Knie-, Ellbogen- und Sprunggelenke, haben jedoch geringere Dynamik und höhere Integrationskosten. Letztlich haben beide Antriebstypen je nach Bewegungsanforderungen, strukturellen Einschränkungen und Leistungsprioritäten ihre Vorteile, wobei Rotationsantriebe – insbesondere Harmonic-Drive-Lösungen – derzeit die marktübliche Wahl für humanoide Roboter-Gelenke sind.