#Produkttrends
Integrierte vs. Externe Drehmomentsensoren in Robotergelenkmodulen: Wichtige Technische Abwägungen für Humanoide und Kollaborative Roboter
Dieser Artikel untersucht die technischen Unterschiede zwischen integrierten und externen Drehmomentsensoren in Roboter-Gelenkmodulen und vergleicht deren Einfluss auf Kompaktheit, Zuverlässigkeit, dynamische Leistung, Wartungsfreundlichkeit sowie zu
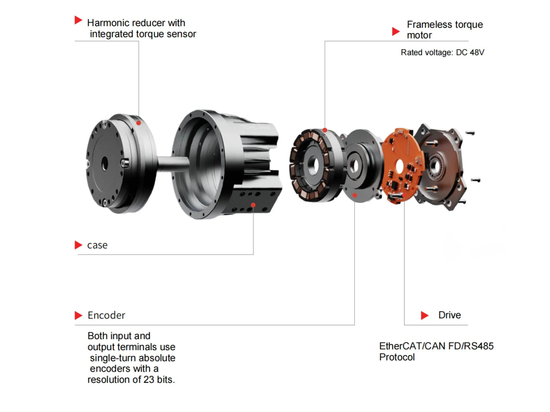
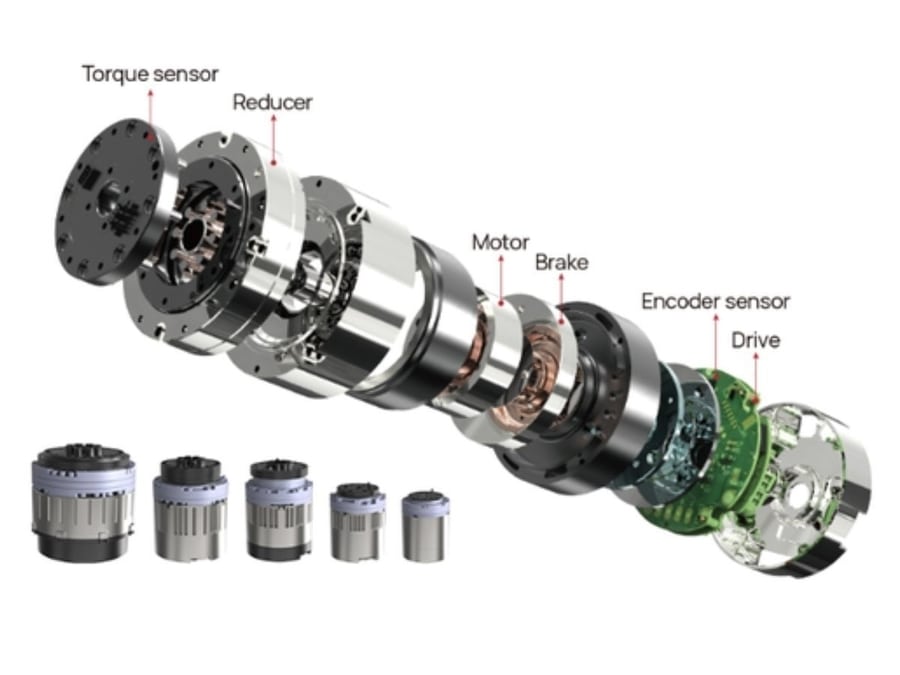
Mit der kontinuierlichen Weiterentwicklung humanoider und kollaborativer Roboter sind Drehmomentsensoren zu einer Schlüsseltechnologie für präzise Kraftregelung und nachgiebige Interaktion geworden. Dieser Artikel analysiert die beiden dominierenden Drehmomentsensor-Architekturen in Roboter-Gelenkmodulen: integrierte Drehmomentsensoren, die tief in die Gelenkstruktur eingebunden sind und Kompaktheit, hohe Zuverlässigkeit sowie hervorragende dynamische Leistung bieten, sowie externe Drehmomentsensoren, die größere Flexibilität, einfachere Wartung und eine hohe Eignung für Forschung und Validierung ermöglichen. Durch den Vergleich ihrer Implementierungsmethoden, Vorteile, Einschränkungen und Anwendungsszenarien zeigt der Artikel die wichtigsten technischen Abwägungen zwischen Integration, Skalierbarkeit, Wartungsfreundlichkeit und Leistung auf und unterstützt Robotikingenieure bei der Auswahl der optimalen Sensorlösung für Robotersysteme der nächsten Generation.