Zu meinen Favoriten hinzufügen
Automatische Übersetzung anzeigen
Dies ist eine automatisch generierte Übersetzung. Wenn Sie auf den englischen Originaltext zugreifen möchten,
klicken Sie hier
#Neues aus der Industrie
{{{sourceTextContent.title}}}
UNIVERSAL ROBOTS ENTWICKELT SCHNITTSTELLE FÜR SIEMENS ENGINEERING PORTAL
{{{sourceTextContent.subTitle}}}
Die UR-Cobots werden Teil der Simatic Robot Library sein, die in die Portalumgebung Totally Integrated Automation (TIA) von Siemens integriert ist, eine der weltweit führenden Automatisierungsplattformen.
{{{sourceTextContent.description}}}
Die Integration der kollaborativen Roboter von Universal Robots in komplexe Maschinen und Fertigungsumgebungen wird bald ein Prozess sein, den Maschinenbauer und Systemintegratoren nahtlos über eine der weltweit führenden Automatisierungsplattformen abwickeln können: das TIA-Portal (Totally Integrated Automation) von Siemens. Die UR-Cobots werden über eine Interpreterschnittstelle, die im vierten Quartal 2021 fertiggestellt sein soll, Teil der Simatic Robot Library innerhalb der TIA-Umgebung von Siemens.
Linienintegration: Vereinfachung des Roboter-Einsatzes
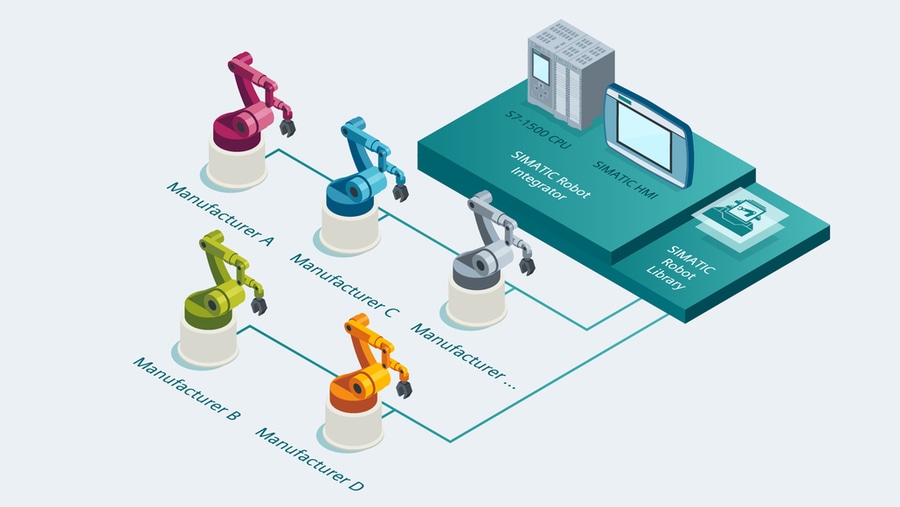
Das ganzheitliche Engineering-Framework TIA Portal unterstützt Anwender bei der Planung umfangreicher Fertigungsautomatisierungsprojekte. Im November 2020 hat Siemens als Ergänzung zu dieser Anwendung die Simatic Robot Library vorgestellt: Die umfassende "Roboterbibliothek" ermöglicht es Anwendern, ihre Cobots über eine einheitliche Benutzeroberfläche direkt im TIA Portal zu programmieren und in ihre Planung einzubeziehen, die nun auch die kollaborativen Roboter von UR einbezieht und damit den Kreis der Unternehmen, die von der Cobot-Technologie profitieren, deutlich erweitert: Branchenübergreifend werden Anwender den UR-Cobots nun im Kontext kompletter Anlagenbaulösungen begegnen
Kombinieren Sie Cobots mit neuen Technologien
Dank des integrierten Designs des TIA-Portals können Anwender die UR-Cobots nun selbstständig in großen Produktionslinien einsetzen und ihnen Funktionen wie Jog-Modus oder Bahnpunktbildung beibringen. Die neue umfangreiche Bibliothek ermöglicht es Anwendern, Programmierbeispiele herunterzuladen und diese zur Steuerung der UR-Cobots zu verwenden