Automatische Übersetzung anzeigen
Dies ist eine automatisch generierte Übersetzung. Wenn Sie auf den englischen Originaltext zugreifen möchten, klicken Sie hier
#Produkttrends
{{{sourceTextContent.title}}}
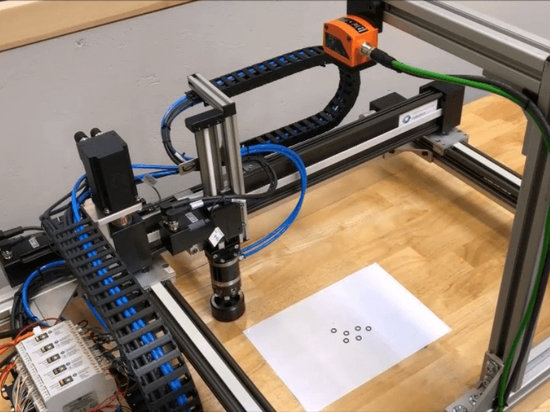
Linearpositionierungstische und XYZ-Tische
{{{sourceTextContent.subTitle}}}
Kartesischer Roboter für Pick-and-Place-Anwendungen.
{{{sourceTextContent.description}}}
Positioniertische und -tische werden in Bewegungssteuerungssystemen verwendet, um ein Werkstück festzuhalten und/oder es für eine bestimmte Operation zu positionieren. Stufen oder Tische, ob linear oder rotierend, sind in den meisten Fällen komplette Bewegungs-Untersysteme. Das heißt, sie sind selbst Bewegungssysteme, die aus einem System von Bewegungssteuerungskomponenten wie Linearbewegungskomponenten, Motoren oder Stellgliedern, Encodern, Sensoren und Steuerungen bestehen. Beispielsweise sind Positionierbühnen in der Regel lineare Bewegungsbaugruppen, die aus Linearführungen oder Schlitten und einer Art von Antriebsmechanismus bestehen.
Tische und Tische werden in einer Reihe von Hochleistungsanwendungen wie Industrierobotern, Glasfaseroptik und Photonik, Bildverarbeitungssystemen, Werkzeugmaschinen, Montage, Halbleiterausrüstung, Laserbearbeitung medizinischer Komponenten, Mikrobearbeitung, Elektronikfertigung und anderen Anwendungen der industriellen Automatisierung eingesetzt.
Die Bühnen können eine von mehreren verschiedenen Bewegungsarten bieten. Dabei kann es sich um lineare, rotierende oder sogar Hubtypen (Z-Achsen-Positionierungstische) handeln. Unter diesen können sie auf viele verschiedene Arten konfiguriert werden, einschließlich der Bewegung in nur eine Richtung (oder Achse), in mehrere Richtungen (X-Y-Positionierung) oder für extrem kleine und präzise Bewegungen, wie bei Nanopositionierungsanwendungen, bei denen die Bewegungen im Mikro- oder Nanometerbereich liegen.
Auch die Antriebsmechanismen für Positionierbühnen und -tische können erheblich variieren, was von einer Reihe von Faktoren wie Kosten und gewünschte Genauigkeit abhängt. So können die Tische zum Beispiel direkt angetriebene Typen sein, die von linearen Servomotoren oder einer Kombination aus Motoren und Getrieben und Kupplungen angetrieben werden, oder lineare oder rotierende Stellantriebe (entweder mit elektrischen Stellantrieben oder sogar mit pneumatischen oder hydraulischen Antrieben). Andere Methoden können Riemen- und Riemenscheibensysteme, Kugelumlaufspindeln oder Gewindespindeln sein.
Präzisions- und Genauigkeitsanforderungen können auch Konstruktionsentscheidungen diktieren, wie z.B. die beim Zusammenbau eines Positioniertisches verwendeten Komponenten. Eine Art von Komponenten, die in Stufen verwendet werden, bei denen Zuverlässigkeit und hohe Genauigkeit erwünscht sind, sind Luftlager. Luftlager tragen eine Last mit einem dünnen Druckluftfilm zwischen dem festen und dem beweglichen Element. Sie werden typischerweise als aerostatische Lager bezeichnet, weil eine Druckquelle und nicht eine relative Bewegung den Luftfilm liefert.
Im Gegensatz zu gewöhnlichen Lagern haben die Oberflächen eines Luftlagers keinen mechanischen Kontakt, so dass diese Systeme nicht geschmiert werden müssen. Da die Oberflächen nicht verschleißen, erzeugen die Systeme keine Partikel, was sie für Reinraumanwendungen geeignet macht. Wenn sie mit sauberer, gefilterter Luft versorgt werden, können die Lager viele Jahre lang ohne Ausfall arbeiten.
Einige wichtige Parameter für die Auswahl des richtigen Positioniertisches sind Dinge wie die erforderliche Auflösung der Anwendung (oder das kleinste zu bewegende oder zu messende Inkrement), die erforderliche Wiederholbarkeit und Genauigkeit sowie andere mechanische Parameter wie Spiel und Hysterese.