Automatische Übersetzung anzeigen
Dies ist eine automatisch generierte Übersetzung. Wenn Sie auf den englischen Originaltext zugreifen möchten, klicken Sie hier
#Produkttrends
{{{sourceTextContent.title}}}
Was ist der Abbé-Fehler und wie wirkt er sich auf lineare Bewegungssysteme aus?
{{{sourceTextContent.subTitle}}}
Abbé-Fehler beginnen als Winkelfehler.
{{{sourceTextContent.description}}}
Bei der Bewertung der Genauigkeit eines linearen Bewegungssystems liegt der Schwerpunkt häufig auf der Positioniergenauigkeit und Wiederholbarkeit des Antriebsmechanismus. Es gibt jedoch viele Faktoren, die zur Genauigkeit (oder Ungenauigkeit) eines Linearsystems beitragen, darunter lineare Fehler, Winkelfehler und Abbé-Fehler. Von diesen drei Arten sind Abbé-Fehler wahrscheinlich am schwierigsten zu messen, zu quantifizieren und zu vermeiden, aber sie können die Hauptursache für unerwünschte Ergebnisse bei Bearbeitungs-, Mess- und hochpräzisen Positionieranwendungen sein.
Abbé-Fehler beginnen als Winkelfehler
Abbé-Fehler werden durch die Kombination von Winkelfehlern im Bewegungssystem und dem Versatz zwischen dem interessierenden Punkt (Werkzeug, Last usw.) und dem Ursprung des Fehlers (Spindel, Führungsbahn usw.) verursacht.
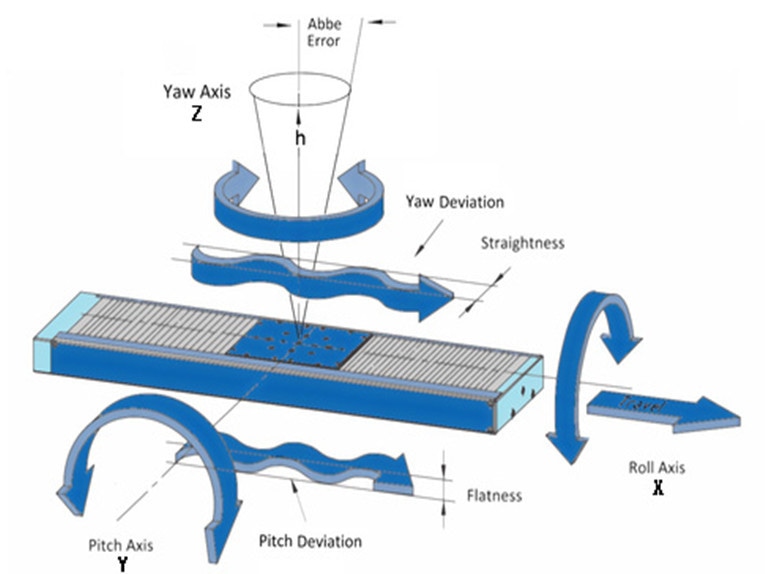
Winkelfehler - gemeinhin als Roll-, Nick- und Gierfehler bezeichnet - sind unerwünschte Bewegungen, die durch die Rotation eines linearen Systems um seine drei Achsen entstehen.
Bewegt sich ein System horizontal entlang der X-Achse, wie unten dargestellt, ist die Neigung als Drehung um die Y-Achse, das Gieren als Drehung um die Z-Achse und das Rollen als Drehung um die X-Achse definiert.
Roll-, Nick- und Gierfehler resultieren in der Regel aus Ungenauigkeiten im Führungssystem, aber auch Montageflächen und -methoden können Quellen für Winkelfehler sein. So können z. B. nicht präzise bearbeitete Montageflächen, unzureichend befestigte Komponenten oder auch unterschiedliche Wärmeausdehnungsraten zwischen dem System und seiner Montagefläche zu Winkelfehlern führen, die größer sind als die der Linearführungen selbst.
Abbé-Fehler sind besonders problematisch, weil sie die in den meisten Fällen sehr kleinen Winkelfehler verstärken und mit zunehmendem Abstand von der fehlerverursachenden Komponente (Abbé-Offset genannt) immer größer werden.
In der Abbildung rechts ist der Abbé-Offset h. Der Betrag des Abbé-Fehlers, δ, kann mit der Gleichung bestimmt werden:
δ = h * tan θ
Bei fliegend gelagerten Lasten ist der Abbé-Fehler umso größer, je weiter die Last von der Ursache des Winkelfehlers (in der Regel die Führungsschiene oder ein Punkt auf der Montagefläche) entfernt ist. Bei mehrachsigen Konfigurationen sind die Abbé-Fehler sogar noch komplexer, da sie durch die Winkelfehler in jeder Achse noch verstärkt werden.
Die besten Methoden zur Minimierung von Abbé-Fehlern sind die Verwendung hochpräziser Führungen und die Sicherstellung, dass die Montageflächen ausreichend bearbeitet sind, damit sie keine zusätzlichen Ungenauigkeiten in das System einbringen. Eine Verringerung des Abbé-Offsets, indem die Last so nah wie möglich an die Mitte des Systems gebracht wird, minimiert ebenfalls die Abbé-Fehler.
Abbé-Fehler lassen sich am genauesten mit einem Laserinterferometer oder einem anderen optischen Gerät messen, das völlig unabhängig vom System ist. Laserinterferometer sind jedoch in den meisten Fällen nicht praktikabel, so dass in vielen Anwendungen, in denen Abbé-Fehler ein Problem darstellen, lineare Messgeräte verwendet werden. In diesem Fall werden die genauesten Messungen des Abbé-Fehlers erzielt, wenn der Lesekopf des Messgeräts auf dem interessierenden Punkt - d. h. dem Werkzeug oder der Last - montiert ist.
XY-Tische sind weniger anfällig für Abbé-Fehler als andere Arten von Mehrachssystemen (z. B. kartesische Roboter), vor allem, weil sie den Auslegerweg minimieren und die Last in der Regel in der Mitte des Y-Achsen-Schlittens arbeiten.