Automatische Übersetzung anzeigen
Dies ist eine automatisch generierte Übersetzung. Wenn Sie auf den englischen Originaltext zugreifen möchten, klicken Sie hier
#Neues aus der Industrie
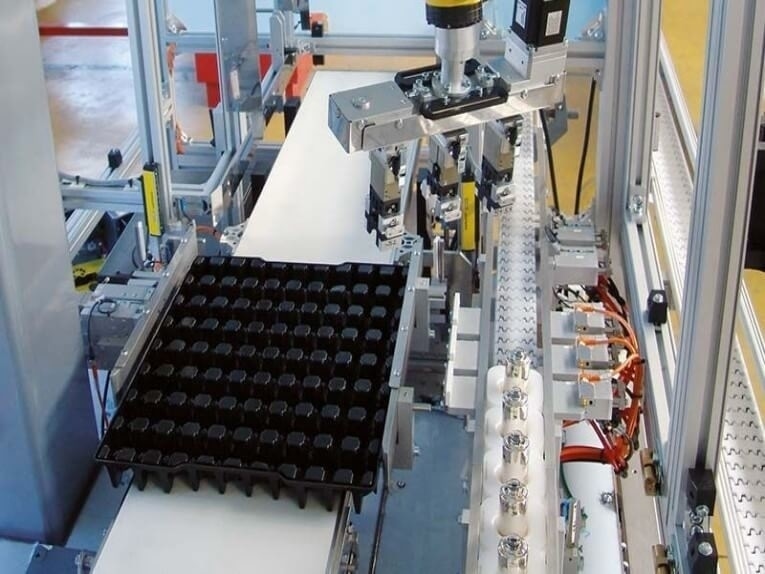
Kartesischer Industrieroboter zur Aufnahme und Platzierung
Lineare Portalrobotersteuerung und Arbeitsbereich.
Pick-and-Place-Anwendungen, wie z. B. im Labor, profitieren von einer freitragenden Konstruktion, da die Komponenten leicht zugänglich sind. Bei Portalrobotern handelt es sich um kartesische Koordinatenroboter mit horizontalen Elementen, die an beiden Enden abgestützt sind; physisch ähneln sie Portalkränen, die nicht unbedingt Roboter sind. Portalroboter sind oft riesig und können schwere Lasten tragen.
Unterschied zwischen Gantry- und kartesischen Robotern
Ein kartesischer Roboter hat einen Linearantrieb auf jeder Achse, während ein Portalroboter zwei Basisachsen (X) und eine zweite Achse (Y) hat, die diese überspannt. Diese Konstruktion verhindert, dass die 2. Achse freitragend ist (mehr dazu später) und ermöglicht im Vergleich zu kartesischen Robotern noch größere Hublängen und eine höhere Traglast.
Bei den meisten kartesischen Robotern wird die doppelt geführte Konstruktion verwendet, da sie einen besseren Schutz gegen auskragende (Moment-)Lasten bietet; allerdings haben Achsen mit doppelter Linearführung einen größeren Fußabdruck als Achsen mit nur einer Führung, im Vergleich dazu sind doppelt geführte Systeme im Allgemeinen kurz (in vertikaler Richtung) und können die Interaktion mit anderen Bereichen der Maschine eliminieren. Das Argument ist, dass die Art der Achsen, die Sie wählen, nicht nur Auswirkungen auf die Effizienz des kartesischen Systems, sondern auch auf den gesamten Platzbedarf hat.
Kartesische Roboteraktuatoren
Wenn ein kartesischer Mechanismus die beste Wahl ist, ist der folgende Konstruktionsfaktor in der Regel die Antriebssteuerungseinheit, die ein bolzen-, schrauben- oder pneumatisch angetriebenes System sein kann. Linearaktuatoren sind in der Regel mit einer einfachen oder doppelten Linearführung erhältlich, je nach Antriebssystem.
Kabelsteuerung und -management
Die Kabelsteuerung ist ein weiteres wesentliches Merkmal dieser Roboterkonstruktion, das in der Anfangsphase oft vernachlässigt (oder lediglich auf spätere Phasen der Planung verschoben) wird. Für die Steuerung, die Luft (bei pneumatischen Achsen), den Encodereingang (bei servogetriebenen kartesischen Achsen), die Sensoren und andere elektrische Geräte sind für jede Achse mehrere Kabel erforderlich.
Wenn Systeme und Komponenten durch das industrielle Internet der Dinge (IIoT) verbunden werden, werden die Methoden und Werkzeuge, die zu ihrer Verbindung verwendet werden, viel kritischer, und diese Schläuche, Drähte und Steckverbinder müssen angemessen verlegt und gewartet werden, um vorzeitige Ermüdung durch übermäßige Biegung oder Unterbrechung durch Interferenzen mit anderen Gerätekomponenten zu vermeiden.
Die Art und Menge der benötigten Kabel sowie die Komplexität des Kabelmanagements hängen von der Art der Steuerung und des Netzwerkprotokolls ab. Beachten Sie, dass die Kabelträger, -wannen oder -gehäuse des Kabelmanagementsystems die Messungen des Gesamtsystems beeinflussen. Stellen Sie also sicher, dass es keine Konflikte mit dem Verkabelungssystem und den übrigen Roboterkomponenten gibt.
Kartesische Robotersteuerungen
Kartesische Roboter sind die bevorzugte Methode für Punkt-zu-Punkt-Bewegungen, aber sie können auch komplexe interpolierte und konturierte Bewegungen ausführen. Die Art der benötigten Bewegung bestimmt das beste Steuergerät, das Netzwerkprotokoll, die HMI und andere Bewegungskomponenten für das System.
Diese Komponenten sind zwar unabhängig von den Roboterachsen angeordnet, haben aber größtenteils Auswirkungen auf die benötigten Motoren, Kabel und anderen elektrischen Komponenten in der Achse. Diese achsennahen Elemente würden die ersten beiden Konstruktionsüberlegungen, die Positionierung und die Kabelsteuerung, beeinflussen.
Damit schließt sich der Konstruktionsprozess und es wird deutlich, wie wichtig es ist, einen kartesischen Roboter als ein miteinander verbundenes elektromechanisches Gerät zu konstruieren und nicht als einen Satz mechanischer Teile, die mit elektrischer Hardware und Software verbunden sind.
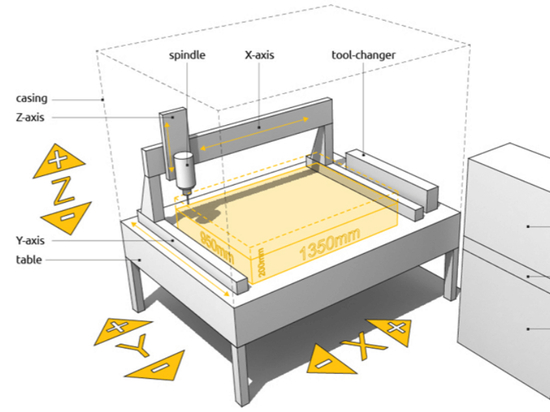
Arbeitsbereich des kartesischen Roboters
Verschiedene Roboterkonfigurationen ergeben unterschiedliche Formen des Arbeitsbereichs. Dieser Arbeitsbereich ist entscheidend für die Auswahl eines Roboters für eine bestimmte Anwendung, da er den Arbeitsbereich des Manipulators und des Endeffektors festlegt. Bei der Untersuchung des Arbeitsbereichs eines Roboters ist aus verschiedenen Gründen Vorsicht geboten:
1. Der Arbeitsbereich ist die Menge an Arbeit, die von einem Punkt am Ende des Roboterarms verrichtet werden kann, der normalerweise in der Mitte der Montageanordnung der Endeffektoren liegt. Er enthält keine Instrumente oder Werkstücke, die zum Endeffektor gehören.
2. Manchmal gibt es Stellen innerhalb des Arbeitsbereichs, die der Roboterarm nicht betreten kann. Tote Zonen sind die Bezeichnung für bestimmte Bereiche.
Die angegebene maximale Nutzlast ist nur bei solchen Armlängen möglich, die die maximale Reichweite erreichen können oder auch nicht.
3. Der Arbeitsbereich der kartesischen Konfiguration ist ein rechteckiges Prisma. Innerhalb des Arbeitsbereichs gibt es keine toten Zonen, und der Roboter kann die gesamte Nutzlast über das gesamte Arbeitsvolumen manipulieren.