#Produkttrends
Was ist ein kartesischer Koordinatenroboter?
Definition, Design und Konfigurationen für ein lineares Positionierungssystem.
Definition des kartesischen Roboters
Ein kartesischer Roboter oder ein kartesischer Koordinatenroboter (auch als Linearroboter bekannt) ist ein Industrieroboter mit drei primären Steuerachsen, die alle linear sind (was bedeutet, dass sie sich entlang einer geraden Linie bewegen, anstatt sich zu drehen) und senkrecht zueinander stehen. Die 3 Gleitgelenke ermöglichen es Ihnen, Ihr Handgelenk auf und ab, nach innen und außen und zurück und vor zu bewegen. Im 3D-Raum ist es unglaublich zuverlässig und präzise. Es ist auch nützlich für die horizontale Bewegung und das Stapeln von Behältern als Roboterkoordinatensystem.
Kartesisches Roboterdesign und -konfigurationen
Um den Konstruktionsmechanismus eines kartesischen Roboters zu verstehen, ist eines der ersten Dinge, die verstanden werden müssen, das Konzept der gemeinsamen Topologie. Ein sich bewegendes Ziel ist durch eine durchgehende Kette von Gliedern und Gelenken an eine Basis aus seriellen Manipulatoren gebunden. Das sich bewegende Ziel ist durch mehrere Ketten (Glieder) mit dem Boden paralleler Manipulatoren verbunden. Die Mehrheit der kartesischen Koordinatenroboter verwendet eine Mischung aus seriellen und parallelen Verbindungen. Alle Roboter mit kartesischen Koordinaten sind dagegen vollständig parallel geschaltet.
Als nächstes kommt der Freiheitsgrad ins Spiel. Kartesische Koordinatenroboter manipulieren üblicherweise Strukturen mit nur linearen Translationsfreiheitsgraden T, da linear arbeitende prismatische P-Gelenke sie betätigen. Andererseits haben wenige Roboter mit kartesischen Koordinaten auch rotatorische R-Freiheitsgrade.
Die Anordnung der Achsen ist eines der ersten Dinge, die bei der Konstruktion eines kartesischen Roboters festgelegt werden müssen, um nicht nur die erforderlichen Bewegungen auszuführen, sondern auch um sicherzustellen, dass das Gerät über eine angemessene Steifigkeit verfügt, die sich auf die Tragfähigkeit, die Verfahrgenauigkeit und die Positioniergenauigkeit auswirken kann .
Einige Anwendungen, die eine kartesische Koordinatenbewegung erfordern, werden von einem Portalroboter besser unterstützt als von einer kartesischen Methode, hauptsächlich wenn die Y-Achse einen langen Hub beinhaltet oder wenn das kartesische Verfahren erhebliche Momente auf die Achsen aufbringt. Eine Portalvorrichtung mit Dual-X- oder Dual-Y-Achsen kann erforderlich sein, um in diesen Situationen unnötige Durchbiegungen oder Vibrationen zu vermeiden.
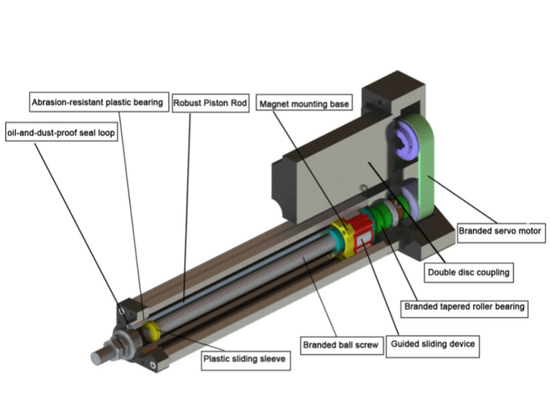
Üblicherweise wird für jede Achse eines kartesischen Koordinatenroboters eine Linearebene, bestehend aus einem geometrisch parallelen Linearaktuator mit Linearlagern, verwendet und der Linearaktuator wird üblicherweise zwischen 2 Linearlagern montiert, die gegen Momentbelastung versetzt sind. Ein XY-Tisch besteht aus zwei senkrecht übereinander gestapelten Lineartischen.