Automatische Übersetzung anzeigen
Dies ist eine automatisch generierte Übersetzung. Wenn Sie auf den englischen Originaltext zugreifen möchten, klicken Sie hier
#Neues aus der Industrie
Was ist ein Pick-and-Place-Roboter und wie funktioniert er?
Portalroboter für die Automatisierung der Lebensmittelindustrie.
Die Lebensmittelverarbeitungs- und -verpackungsindustrie wächst in rasantem Tempo. Um den wachsenden Anforderungen und der geforderten Effizienz gerecht zu werden, setzen die Hersteller Roboter ein, um Aufgaben zu erledigen, die sonst nur von Hand ausgeführt werden können.
Bestückungsroboter sind eine der am häufigsten eingesetzten Automatisierungsmaschinen im Bereich der Lebensmittelverpackung.
Was ist ein Pick-and-Place-Roboter?
Pick-and-Place-Roboter ermöglichen es Unternehmen, automatisierte Lösungen für das Heben von Objekten von einem Ort und deren Platzierung an anderen Orten zu nutzen.
Einfache Aufgaben wie das Anheben oder Bewegen von Gegenständen erfordern nicht viel Denkarbeit. Daher kann der Einsatz menschlicher Arbeitskräfte für diese Aufgaben verschwenderisch sein, da die Arbeitskräfte für andere Aufgaben eingesetzt werden können, die höhere geistige Fähigkeiten erfordern.
Diese sich wiederholenden Aufgaben werden von Pick-and-Place-Robotern übernommen. Diese Roboter sind häufig mit Sensoren und Bildverarbeitungssystemen ausgestattet, um Objekte von einem laufenden Förderband zu heben.
Wer hat Pick-and-Place-Roboter erfunden?
Die Pick-and-Place-Roboter, die heute für monotone Aufgaben in der Lebensmittelverpackungsindustrie eingesetzt werden, basieren auf den Delta-Robotern. Delta-Roboter wurden in den frühen 1980er Jahren von einem Forschungsteam unter der Leitung von Professor Reymond Clavel an der EPFL in der Schweiz entwickelt.
Die Massenproduktion von Verpackungsrobotern begann 1987, als ein Schweizer Unternehmen namens Demaurex die Lizenz für die Entwicklung dieser Roboter erwarb.
Im Jahr 1999 wurde der FlexPicker Delta-Roboter von ABB Flexible Automation auf den Markt gebracht, der sich zu einem bedeutenden Wendepunkt in diesem Bereich entwickelte.
Der Bereich der Pick-and-Place-Roboter entwickelt sich weiter, und die Forscher optimieren diese Roboter für die Entnahme noch kleinerer Teile für Computerprozessoren oder für sich wiederholende Aufgaben mit höherer Geschwindigkeit und Präzision.
Wie funktionieren Pick-and-Place-Roboter?
Es gibt verschiedene Ausführungen von Pick-and-Place-Robotern, je nach der spezifischen Anwendung, für die sie eingesetzt werden. Das Grundprinzip der meisten dieser Konstruktionen ist ähnlich.
Diese Roboter sind in der Regel auf einem stabilen Ständer montiert und haben einen langen Arm, der den gesamten Arbeitsbereich erreichen kann. Das Ende des Arms ist auf die Art der Objekte spezialisiert, die der Roboter bewegen soll.
Diese Roboter können Gegenstände von einer stationären Fläche zu einer stationären Fläche, von einer stationären zu einer beweglichen Fläche, von einer beweglichen zu einer stationären Fläche und von einer beweglichen zu einer beweglichen Fläche (z. B. zwischen zwei Förderbändern) transportieren.
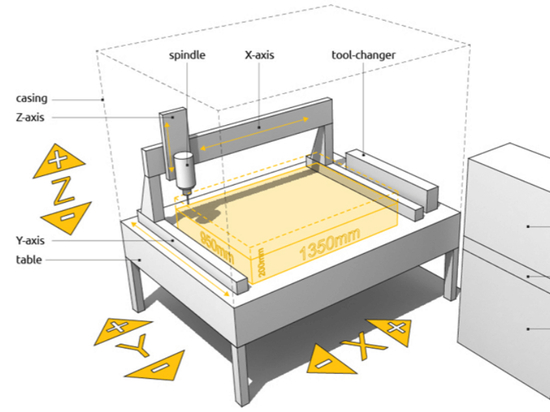
Wie viele Achsen kann ein herkömmlicher Pick-and-Place-Roboter bewegen?
Einfache Pick-and-Place-Roboter, die Gegenstände anheben und an anderen Stellen ablegen, haben einen 5-Achsen-Roboterarm. Es werden jedoch auch 6-achsige Roboterarme eingesetzt, die die Gegenstände drehen können, um ihre Ausrichtung zu verändern.
Was sind die verschiedenen Teile eines Pick-and-Place-Roboters?
Ein Pick-and-Place-Roboter hat mehrere spezielle Teile, wie z. B.:
Roboterarm-Werkzeug: Ein Roboterarm, auch Manipulator genannt, ist die Verlängerung des Roboters durch zylindrische oder kugelförmige Teile, Glieder und Gelenke.
Endeffektor: Der Endeffektor ist das Zubehörteil am Ende des Roboterarms, das die gewünschte Aufgabe wie das Greifen von Objekten übernimmt. Die Endeffektoren können je nach Anforderung für unterschiedliche Funktionen ausgelegt werden.
Aktuatoren: Aktuatoren erzeugen die Bewegung im Roboterarm und in den Endeffektoren. Bei den linearen Aktuatoren handelt es sich im Grunde um jede Art von Motor, z. B. Servomotor, Schrittmotor oder Hydraulikzylinder.
Sensoren: Die Sensoren sind sozusagen die Augen des Roboters. Die Sensoren übernehmen Aufgaben wie die Erkennung der Position eines Objekts.
Steuerungen: Steuerungen synchronisieren und steuern die Bewegung der verschiedenen Aktoren eines Roboters und sind somit das Gehirn hinter dem reibungslosen Roboterbetrieb.