Automatische Übersetzung anzeigen
Dies ist eine automatisch generierte Übersetzung. Wenn Sie auf den englischen Originaltext zugreifen möchten, klicken Sie hier
#Neues aus der Industrie
{{{sourceTextContent.title}}}
4 Typen von Linearmotor-Magneten
{{{sourceTextContent.subTitle}}}
Linearmotoren mit Eisenkern, eisenlose Linearmotoren, nutenlose Linearmotoren, rohrförmige Linearmotoren.
{{{sourceTextContent.description}}}
Ein Linearmotor ist ein direkt angetriebener Elektromotor, der eine lineare Kraft in einer geraden Linie erzeugt und elektrische Energie in mechanische Energie als lineare Bewegung ohne zusätzlichen Übertragungsmechanismus umwandelt. Man kann sich das so vorstellen, dass man einen rotierenden Motor aus der radialen Richtung herausschneidet und ihn flach auslegt.
Je nach magnetischem Aufbau gibt es zwei Haupttypen von Linearmotoren: solche mit Eisenkern und solche ohne Eisenkern. Linearmotoren mit Eisenkern werden manchmal auch als flache Linearmotoren bezeichnet. Eisenlose Linearmotoren werden auch als Luftkern- oder U-Kanal-Linearmotoren bezeichnet. HGT liefert den Sekundärteil des Linearmotors, die Magnetbaugruppe. Eine Linearmotor-Magnetbaugruppe ist eine Magnetbahn mit Dauermagneten, die auf einer oder mehreren Jochplatten befestigt sind. Sie kann als abgerollter Rotor eines bürstenlosen DC-Rotationsmotors betrachtet werden.
Aufgrund der magnetischen Anziehungskraft zwischen Eisenblech und Dauermagneten können Linearmotoren mit Eisenkern eine hohe Schubkraft erzeugen. Aufgrund ihrer offenen Struktur können sie leicht Wärme ableiten. Mit einer Reihe von Magneten und einer einfacheren Struktur sind sie in der Regel billiger. Linearmotoren mit Eisenkern eignen sich für Pressen, Gussformen. PCB-Bohrmaschinen, Druck, Geschwindigkeitsstabilitätsanwendungen.
Mit Primärspulen, die anstelle von Stahlblechpaketen in Epoxid eingekapselt sind, haben eisenlose Linearmotoren eine hohe Laufruhe und kein Ruckeln. Außerdem haben sie ein geringeres Gewicht und kürzere Einstellzeiten. Eisenlose Linearmotoren eignen sich für Hochgeschwindigkeitsmontage und -transport, Scannen, nichtmechanische Lager, Halbleiter- und Vakuumanwendungen.
Für die verschiedenen beweglichen Teile (Drehspule und bewegliche Magnetbahn) gibt es zwei Arten von Systemen. In der Regel ist die Magnetbahn der stationäre Teil und der Spulenkörper der bewegliche Teil, um durch die geringere Masse eine höhere Beschleunigung zu erreichen. Motoren mit beweglichen Magneten sind jedoch in der Lage, eine höhere Präzision zu erreichen. Die Form der Linearmotoren kann wie folgt aussehen: eine Platte mit einer oberflächenmontierten Schiene mit einem beweglichen Forcer (flache Linearmotoren), zwei parallele Magnetschienen, die sich gegenüberliegen, mit dem Forcer in der Mitte (U-Kanal-Linearmotoren) oder ein Forcer, der sich auf einer zylindrischen Stange bewegt, in der die Magnete untergebracht sind (röhrenförmige Linearmotoren). Die spezifische Konfiguration hängt von den Betriebsbedingungen und der jeweiligen Anwendung ab. Es werden nur wenige Typen unterschieden.
Linearmotoren mit Eisenkern bestehen aus dreiphasigen elektromagnetischen Spulen, die um den Eisenkern (Zähne) der Lamellen auf dem Forcer gewickelt sind, und der Eisenkern kann die Kraftausgabe erhöhen. Allerdings treten auch Rastmomente und Anziehungskräfte zwischen Forcer und Laufbahn auf, die sich auf die Schubkraft und die Lebensdauer der Lager auswirken.
Eisenlose Linearmotoren werden manchmal auch als U-Kanal-Linearmotoren bezeichnet, und die Wicklungen sind in Epoxidharz und nicht in einem Eisenblechpaket montiert. In der Regel ist die Spulenwicklung dreiphasig und bürstenlos kommutiert. Kein Rastmoment und keine Anziehungskraft verlängern die Lebensdauer der Lager, aber die abgegebene Kraft ist geringer.
Nutenlose Linearmotoren kombinieren die Konstruktionselemente von Eisenkernmotoren und eisenlosen Motoren. Die dreiphasigen Spulen mit rückseitigem Eisen werden mit Epoxid über eine einzige Spur zusammengehalten. Sie sind kostengünstiger und haben eine bessere Wärmeableitung als eisenlose U-Kanal-Motoren und eine geringere Anziehungskraft und ein geringeres Rastmoment als eisenlose Motoren.
Die nutenlosen eisenlosen Flachmotoren bestehen aus Spulen, die auf einem Aluminiumsockel montiert sind. Während die nutenlosen eisenlosen Flachmotoren aus Spulen bestehen, die auf Eisenbleche montiert sind, die zur Ausrichtung des Magnetfelds und zur Erhöhung der Kraft verwendet werden, und dann auf den Aluminiumsockel montiert werden. Anziehungskraft und Rastmoment sind bei der Konstruktion mit Eisenblechen vorhanden, aber diese Konstruktion erzeugt mehr Kraft als die eisenlose Konstruktion.
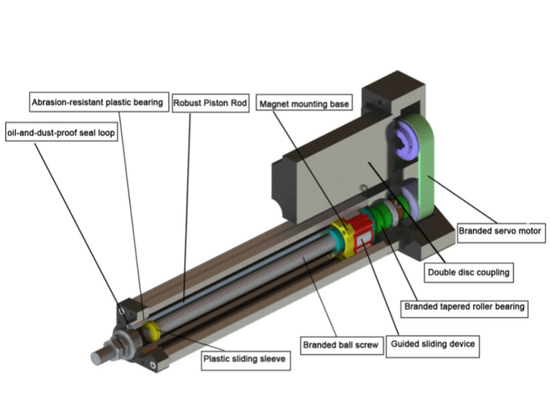
Rohrförmige Linearmotoren sind eine weitere Art von Linearmotoren. Die Spulenwicklung ist in der Regel dreiphasig, mit bürstenloser Kommutierung unter Verwendung von Hall-Effekt-Geräten, und diese Motoren können mit eisenhaltigen oder eisenlosen Statoren gebaut werden. Beim rohrförmigen Linearmotor umgeben die Spulen eine zylinderförmige Magnetwelle. Wenn der Strom in der Spule über die Dreiphasenwicklung eingestellt wird, werden Magnetfelder erzeugt.
Der Schwingspulenmotor, auch als nicht kommutierter Gleichstrom-Linearmotor bekannt, ist ein einphasiger rohrförmiger Linearmotor mit beweglichen Spulen oder beweglichen Magneten. Er besteht aus Permanentmagneten und Spulen, und wenn der durch die Spule fließende Strom mit den Permanentmagnetfeldern interagiert, wird die Bewegungskraft erzeugt.