#Neues aus der Industrie
Resonanzvermeidung Bei Schrittmotoren
Schrittmotoren sind bürstenlose Elektromotoren, die meist eine hohe Polanzahl aufweisen.
Sie sind als einfache und kostengünstige Positionierungslösung verbreitet, da sie sich ohne Rotorpositionsrückführung (wie bspw. einen Encoder oder einen integrierten Hall-Sensor) schrittweise steuern lassen. Diese Art der rückführungslosen Motorsteuerung wird auch als offener Regelkreis bezeichnet. Unter bestimmten Bedingungen können durch die Konstruktion dieser Motoren und die Art ihrer Steuerung jedoch Probleme entstehen. Dieses Paper stellt eine Reihe von Möglichkeiten vor, um diese Probleme zu vermeiden und eine einwandfreie Bewegung zu gewährleisten.
ALLGEMEINES ZU SCHRITTMOTOREN
Schrittmotorphasen werden sequenziell von einer externen elektronischen Steuerung kommutiert, die den Rotor (üblicherweise mit Permanentmagnet) dabei von einer stabilen Position in die nächste bewegt. Das Drehmoment des gewählten Motors muss ausreichen, um Rotor und Last nach jeder Kommutierung auf den nächsten Schritt zu bewegen. Ist das Drehmoment unzureichend oder die Drehzahl zu hoch, kann der Gleichlauf von Steuerung und Istposition des Rotors verloren gehen. Dies kann zu Schrittverlusten, Drehrichtungswechseln und allgemein einer fehlerhaften Bewegung führen.
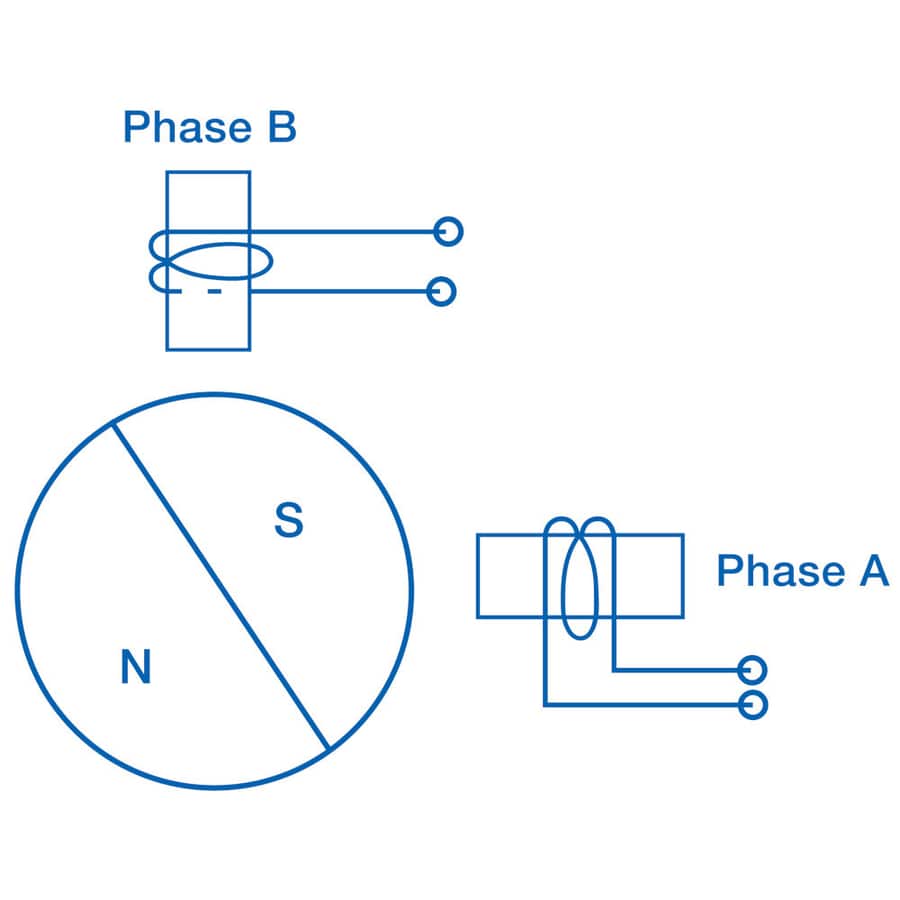
In Abbildung 1 ist das Prinzip eines sehr einfachen 2-Phasen- Schrittmotors mit einem Polpaar dargestellt. Die elektronisch gesteuerte Kommutierungssequenz (A, B, -A, -B) führt zu einer vollen vierschrittigen Rotorumdrehung (90° pro Schritt).
SCHWINGUNG UM EINE STABILE POSITION
Der Rotor tendiert dazu, seine Pole bei jedem Schritt an den Polen des Stators auszurichten. Solange eine Phase durchgängig erregt ist (ohne Wechsel zur nächsten Phase), bleibt die Rotorposition stabil.
(Abbildung 2) Im Diagramm oben ist dargestellt, dass der Motor ein negatives Drehmoment entwickelt, wenn der Rotor die Zielposition schneller erreicht. Dadurch wird der Rotor zurück in die Zielposition gezogen. Bleibt der Rotor dagegen hinter der Zielposition zurück (links), wird er durch ein positives Drehmoment in die Zielposition geschoben. Unter diesen Bedingungen kommt es leicht zu einem Schwingungsphänomenon, da das Rotorträgheitsmoment (einschließlich eines ggf. bestehenden Lastträgheitsmoments) verhindert, dass der Rotor genau in der stabilen Position anhält. Immer, wenn sich der Rotor von einer stabilen Position in die nächste stabile Position (einen Schritt weiter) bewegt, überschwingt die Winkelposition aufgrund der kinetischen Energie bei der Annäherung üblicherweise die Zielposition des Rotors. Der Rotor beginnt dann, um Position zu schwingen, sobald das negative Drehmoment ihn zurück in die Zielposition holt. Die Eigenfrequenz dieser periodischen Schwingung lässt sich wie folgt berechnen:
Die Schwingungsamplitude nimmt aufgrund von Systemverlusten im Zeitverlauf jedoch ab. Diese Abnahme der Amplitude wird meist als „Dämpfung“ bezeichnet und hängt von mehreren Faktoren ab. Ist nur eine Phase erregt, bringt die Dämpfung den Rotor schließlich immer in eine stabile Position. In manchen Fällen bei sequenzieller Phasenerregung (Kommutierung) ist es jedoch sinnvoll, die Dämpfung zu optimieren.
Bei hoher Drehzahl verkürzt sich die Kommutierungsperiode, und wenn die Schwingung vor Ausgabe des Befehls für den nächsten Schritt nicht beendet ist, kann es zu Resonanz kommen (die Neigung des mechanischen Systems, bei größerer Amplitude zu reagieren). Dies ist wahrscheinlich, wenn die Kommutierungsfrequenz wie oben gezeigt nah an der Eigenfrequenz des Systems liegt. (Abbildung 3)
Resonanz kann zu fehlerhaftem Motorbetrieb, Schrittverlusten und wahllosen Wechseln der Drehrichtung führen. Deshalb gilt es, Resonanzen unbedingt vorzubeugen und so den ordnungsgemäßen Gleichlauf von Befehl und Istposition des Rotors zu gewährleisten.
MÖGLICHKEITEN ZUR VERHINDERUNG VON RESONANZ
Vermeidung von Eigenfrequenz
Zu Resonanzen kommt es üblicherweise, wenn die Kommutierungsfrequenz nah an der Eigenschwingungsfrequenz des mechanischen Systems liegt. Der einfachste Weg, Resonanz zu verhindern, besteht also darin, die Kommutierungsfrequenz anhand der beschriebenen Parameter auf Abstand zur Systemeigenfrequenz zu halten. Eine Änderung der Kommutierungsfrequenz ist jedoch nicht immer möglich, da manchmal andere Änderungen erforderlich sind, um die Geschwindigkeitsänderung zu kompensieren.
Verschiebung der Eigenfrequenz
Einer Änderung der Kommutierungsfrequenz vorzuziehen ist die Verschiebung der Eigenfrequenz in eine höhere oder niedrige Frequenz. Das verhindert ihre Übereinstimmung mit der Kommutierungsfrequenz. Dazu werden üblicherweise die beiden Parameter herangezogen, die die Eigenfrequenz beeinflussen: das Haltemoment und das Gesamtträgheitsmoment des Systems.
• Haltemoment
Motoren werden üblicherweise für den Einsatz bei ihrem Nennstrom ausgelegt. Dieser definiert das Haltemoment. Ein höherer Strom (zur Erhöhung des Haltemoments) ist im Dauerbetrieb nicht möglich, da der dadurch erhöhte Energieverlust zu einer Überhitzung der Spule führen würde. Sofern ein kleineres Drehmoment für die Erfordernisse der Anwendung ausreicht, besteht jedoch die Möglichkeit, einen niedrigeren Strom (zur Verringerung des Haltemoments und zur Verschiebung der Eigenfrequenz nach unten) zu verwenden.
• Trägheitsmoment
Das Trägheitsmoment des mechanischen Systems ist die Summe aus Trägheitsmoment des Motorrotors und Lastträgheitsmoment. Durch Anpassungen des Designs kann der Konstrukteur das Trägheitsmoment des Rotors verändern. Die Eigenresonanzfrequenz eines lastfreien Motors ist üblicherweise in den technischen Daten des Motors angegeben. Zusätzlich kann der Anwender auch das Lastträgheitsmoment verändern (das vollständig unabhängig vom Motor ist). Ein höheres Trägheitsmoment verlagert die Eigenfrequenz des Systems insgesamt nach unten, während tieferes Trägheitsmoment die Eigenfrequenz erhöht. Wird das Trägheitsmoment des Systems geändert, kann sich dies auf die Motorleistung in der Anwendung auswirken. Deshalb sollte zur Gewährleistung des einwandfreien Betriebs hier Rücksprache mit dem Motorlieferanten gehalten werden.
Vermeidung von Resonanz durch Mikroschritte
Je höher die Energie ist, die an das mechanische System übertragen wird, desto wahrscheinlicher sind auch Resonanzphänomene. Um dies zu verhindern, können Mikroschritte eine gute Alternative zum Schrittmotorbetrieb mit Vollschritten sein. Mikroschritte (Halbschritt, Viertelschritt usw.) haben einen kleineren Schrittwinkel und benötigen weniger Energie für die Bewegung von einer stabilen Position in die nächste. Dadurch werden das Überschwingen der Zielposition und die Schwingungsamplitude verkleinert. In vielen Fällen lassen sich Resonanzen dadurch erfolgreich verhindern.
Daneben sorgen Mikroschritte im Allgemeinen für einen leiseren, vibrationsärmeren und ruhigeren Betrieb. Schrittmotoren werden deshalb häufig in Mikroschritten gesteuert.
Vermeidung von Resonanz durch Dämpfung
Es gibt verschiedene Arten von Dämpfungsfaktoren:
• Lastreibung und Motorlagerreibung
Reibung entspricht einem von der Motordrehzahl unabhängigen konstanten Bremsmoment (entgegengesetzt zu der Istdrehrichtung). Das trägt zwar zur Schwingungsdämpfung und zur Vermeidung von Resonanz bei. Es gilt jedoch zu berücksichtigen, dass Reibung unabhängig von der Drehzahl zugleich die Motorlast erhöht. Daher sollte bei einer Erhöhung der Reibung zur Resonanzvermeidung unbedingt sichergestellt werden, dass die Motorleistung dafür ausreicht.
• Viskose Reibung
Auch viskose Reibung bedingt ein Bremsmoment, wobei sich die Größenordnung sich hier jedoch nach der Motordrehzahl richtet. Je höher die Drehzahl, desto stärker die viskose Dämpfung. Dieses Verfahren zur Dämpfung einer Schwingungsbewegung wird allgemein bevorzugt. Es bedingt eine starke Bremsung bei hoher Schwingungsamplitude (höhere Drehzahl zu Beginn) und eine nur geringe Bremsung bei kleinerer Schwingung (anders als trockene Reibung, bei der die Bremsung auch bei geringer Drehzahl dieselbe bleibt). Viskose Reibung ist damit eine gute Möglichkeit, um Schwingungen zügig zu dämpfen, ohne die Motorlast zu stark zu erhöhen.
Viskose Reibung in einem System kann durch verschiedene Phänomene erzeugt werden:
» Im Statoreisen erzeugter Wirbelstrom (Eisenverluste), der als Bremsmoment wirkt. Diese Verluste nehmen zusammen mit der Drehzahl zu und fehlen, wenn keine Bewegung erfolgt. Sie können daher als viskose Reibung betrachtet werden. Eisenverluste können je nach Motorkonstruktion und -technologie von Motor zu Motor anders ausfallen. Bei Scheibenmagnetmotoren sind die Eisenverluste meist begrenzt, sodass sie relativ hohe Drehzahlen erreichen. Bei Scheibenmagnetmotoren sollten Schwingungen daher nicht ausschließlich anhand von Eisenverlusten gedämpft werden und vielmehr auch andere Möglichkeiten zur Vermeidung von Resonanz berücksichtigt werden.
» Die in der Spule induzierte Gegen-EMK (Spannung) führt zu einem Strom und zu einem Bremsmoment, das die Schwingung dämpft. Dieser Strom ist üblicherweise bei Kurzschließen der nicht erregten Phase möglich, und da der Wert proportional zur Motordrehzahl ist (je höher die Motordrehzahl, desto höher das Bremsmoment), lässt sich dies als viskose Reibung betrachten. Bei Choppersteuerungen (Konstantstrom) ist diese Art von Dämpfung üblicherweise nicht möglich, da der Strom trotz schwankender Gegen-EMK konstant ist.
» Elektronische Dämpfungslösungen sind möglich, wenn der Motor auf spezielle Weise gesteuert wird, ohne die mechanischen Systemparameter zu verändern.
» Es besteht auch die Möglichkeit, einen externen mechanischen Dämpfer in die Anwendung oder den Motor zu integrieren, der einen Teil der Schwingungsenergie durch viskose Reibung absorbiert und so Resonanzphänomene verhindert.
FAZIT
Der schrittweise sequenzielle Betrieb von Schrittmotoren kann zu Resonanzproblemen führen, sobald mehrere Resonanzphänomene begünstigende Bedingungen gleichzeitig bestehen. In manchen Fällen lässt sich die Resonanz durch Beseitigung nur einer dieser Bedingungen beseitigen. Resonanzen können je nach Motortechnologie und -konstruktion neben der Eigenschwingungsfrequenz noch durch weitere Frequenzbereiche ausgelöst werden. Das können unter anderem Mittelfrequenzresonanzen sein. Motoranbieter unterstützen Kunden bei der Bestimmung der Frequenzbereiche, die Resonanzen auslösen können, und der Suche nach Möglichkeiten, dies zu verhindern.


