Automatische Übersetzung anzeigen
Dies ist eine automatisch generierte Übersetzung. Wenn Sie auf den englischen Originaltext zugreifen möchten, klicken Sie hier
#Produkttrends
{{{sourceTextContent.title}}}
Wie man eine 6DOF-Bewegungsplattform selbst baut
{{{sourceTextContent.subTitle}}}
für Simulatoren (Rennen/Flug/Training/Rumpf)
{{{sourceTextContent.description}}}
Komponenten des 6DOF-Bewegungssystems
Das 6DOF-Bewegungssystem besteht aus einer Bewegungsplattform, elektrischen Aktuatoren, einem Motorantriebssystem, einer Steuerung usw..
Die untere Bewegungsplattform ist mit dem Boden verbunden, während die obere Plattform die Nutzlast trägt.
Was die Aktuatoren des Simulators betrifft, so können Sie je nach Bedarf ein geeignetes Modell auswählen.
Ich weiß, dass viele von Ihnen neugierig sind: "Wie viel Nutzlast brauche ich für die UNI 6DOF-Bewegungsplattform?"
Nun, das hängt von Ihren Anforderungen ab. Aber die einzelne Last des Aktuatorwerts ist nicht die Nutzlast geteilt durch sechs. Das ist leicht zu verstehen. Wenn sich die Plattform zu einer Seite neigt, dann ist der Schwerpunkt ungleichmäßig. Eine einzelne Last des Aktuators ist nicht in der Lage, eine schwere Nutzlast zu tragen. Auch der Auftrieb der Kugelumlaufspindel wird dadurch verringert. Auch das Gewicht des Cockpits und des Monitors muss berücksichtigt werden.
Normalerweise werden Motor und Antrieb zusammen mit dem Aktuatorsatz geliefert. DC/AC-Servomotoren sind am beliebtesten. Der Motorantrieb betätigt den elektrischen Aktuator, nachdem er Signale vom Steuersystem erhalten hat. Sie können die Position und Geschwindigkeit genau und einfach steuern. Allerdings sind DC-Systeme natürlich preiswerter. Außerdem wird eine Stromversorgung benötigt. Stellen Sie daher sicher, dass die Leistung der Stromversorgung doppelt so hoch ist wie die Motorleistung.
Das Computersteuerungssystem ist so programmiert, dass es den Hub und die Geschwindigkeit der elektrischen Linearantriebe steuert, um die Bewegung der Bewegungsplattform mit mehreren Freiheitsgraden im dreidimensionalen Raum zu realisieren. Insbesondere kann die Bewegungsplattform ihre Position in Form von Vorwärts-/Rückwärts- (Surge), Aufwärts-/Abwärts- (Heave) und Links-/Rechtsverschiebungen (Sway) in drei senkrechten Achsen ändern, kombiniert mit Orientierungsänderungen durch Rotation um drei senkrechte Achsen, die oft als Gieren (Normalachse), Nicken (Querachse) und Rollen (Längsachse) bezeichnet werden.
Wenn Sie keine Erfahrung mit der Herstellung von Steuerungssystemen haben, kann Ihnen unser Ingenieurteam helfen. Die UNI Tech-Steuerung ist mit jeder Software kompatibel, die Telemetriedaten in jedem Protokoll exportieren kann. Unser Controller ist mit Software wie Real Engine, Unity usw. kompatibel. Die Plug-and-Play-Lösung deckt 100% der Kundenanforderungen weltweit ab.
Eine kurze Beschreibung der wichtigsten Komponenten
1)Bewegungsplattform
Die obere Plattform ist mit dem simulierten Mechanismus verbunden, wie z. B. dem Cockpit, dem Fahrersitz oder dem Flugkabinett usw.
Was die Montagegelenke betrifft, so sind Universalgelenke am gebräuchlichsten, da sie eine Drehung von bis zu 35 Grad ermöglichen. Das obere Gelenk verbindet die obere Plattform mit der Kolbenstange der elektrischen Antriebe. Das untere Gelenk verbindet die feste Bodenplatte mit der hinteren Abdeckung des Stellantriebs.
Der Hub, die Geschwindigkeit und die Nutzlast der Plattform können je nach den Anforderungen des Kunden angepasst werden.
Die untere Plattform ist auf dem Boden montiert, um einen Vorschlag zu fixieren. Darüber hinaus sind die Verbindungsgelenke für einen größeren Rotationsgrad verfügbar. Zum Beispiel, 6DOF Bewegungssystem Plattform mit Drehgelenken an beiden Enden bis zu 360 Grad der Rotation.
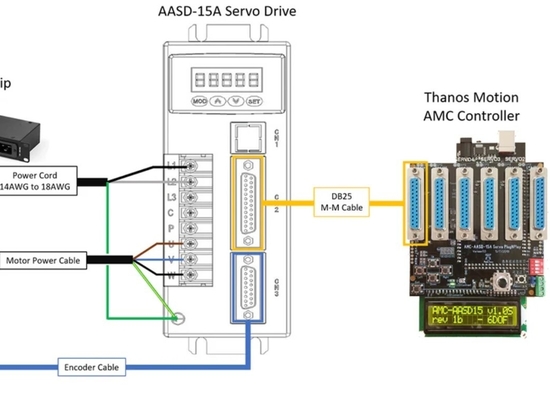
2)Die Hardware des Computersteuerungssystems
Die Bewegungssteuerungseinheit: Sie verwendet die Servosteuerungseinheit, die einen Motortreiber als Empfänger des Bewegungssignals beinhaltet, um den Start und die Pause der gesamten Bewegungsplattform zu realisieren.
Darüber hinaus empfängt sie das Steuersignal, das vom Host-Computer gesendet wird, steuert die Bewegung der elektrischen Zylinder, überwacht den Servomotor-Treiber und die Bewegung des gesamten Steuerungssystems, verarbeitet die Störung sowie den Sicherheitsschutz.
Die Signalverarbeitungseinheit: Sie verarbeitet alle Sensorsignale, die sich auf das gesamte Bewegungsplattformsystem beziehen, das Prüfsignal und das digitale E/A-Signal sowie die Ansteuerung des Servomotortreibers. Im Moment verwenden wir eine ganze Reihe von Steuerungssystemen, die wir bei Bedarf bereitstellen können.
3)Die Steuerungssoftware
Was die Computer-Software für die Bewegungssteuerung betrifft, so sind Bewegungssteuerungssoftware und Logiksteuerungssoftware enthalten, die durch einfachen Anschluss an einen Computer gesteuert werden können. Unsere Software beinhaltet: 1. empfang von Daten aus Spielen; 2. Motion Cueing; 3.Motion Cueing Rückmeldungen an die Bewegungsplattform.
Für diejenigen, die eine DIY 6DOF Bewegungsplattform oder eine unterhaltsame Plattform mit mehreren Freiheitsgraden bauen wollen, kann die Aktion des Spielers durch eine gekaufte Spielsoftware erfasst werden. Darüber hinaus wird das Aktionssignal an den Controller gesendet, der mit den elektrischen Aktuatoren verbunden ist, um den Fahrer dazu zu bringen, die elektrischen Zylinder für das Aus- und Einfahren zu betätigen, wodurch ein immersives Simulationserlebnis realisiert werden kann.