Automatische Übersetzung anzeigen
Dies ist eine automatisch generierte Übersetzung. Wenn Sie auf den englischen Originaltext zugreifen möchten, klicken Sie hier
#Produkttrends
{{{sourceTextContent.title}}}
Optimierungslösung für das Anziehen von Schrauben in einer Roboter-Staubsauger-Produktionslinie
{{{sourceTextContent.subTitle}}}
Schraubenzieher, Elektroschrauber mit Datenrückverfolgung, Elektroschrauber mit Winkelkontrolle
{{{sourceTextContent.description}}}
I. Kernprobleme der traditionellen Befestigungsprozesse in Roboterstaubsauger-Montagelinien
Bei der automatisierten Montage eines kompletten Staubsaugerroboters ist die Befestigung des Chassis ein kritischer Prozess, der sich auf die Produktqualität und die Taktzeit der Produktion auswirkt. Das Chassis eines Staubsaugerroboters ist häufig eine unregelmäßige, runde ABS-Struktur. Darin sind Präzisionskomponenten wie Antriebsmotoren, Kondensatoren und geformte Kabelbäume integriert. Die Befestigungspunkte sind verstreut, und die Struktur des Werkstücks ist speziell. Bei der herkömmlichen Produktion werden die Schrauben in der Regel von Hand angezogen, was seit langem bestehende Produktionsprobleme wie mangelnde Genauigkeit, geringe Effizienz, fehlende Rückverfolgbarkeit der Daten und schwierige Umrüstungen zur Folge hat und die Aufrüstung der Produktionslinien stark einschränkt.
1. Schwierigkeiten bei der Ausrichtung während des manuellen Anziehens.
Die unregelmäßige Struktur des Roboterstaubsaugergehäuses ist komplex. Die Befestigungspunkte sind an den gekrümmten Seiten und in der zentralen Motorposition verstreut. Während des manuellen Anziehens müssen die Bediener das Werkstück immer wieder bewegen und ihren Arbeitswinkel anpassen. Das Ausrichten von Exzenterschrauben dauert lange und ist wenig präzise. Die vom Bediener aufgebrachte Kraft ist uneinheitlich, was leicht zu Problemen wie schwimmenden Schrauben oder abgenutzten Gewinden führt. Bei häufigem Betrieb besteht außerdem die Gefahr, dass das Gehäuse angestoßen und verkratzt wird. In der Massenproduktion bleibt die Fehlerquote hoch, was die Nacharbeits- und Ausschusskosten erheblich erhöht.
2. Die schlechte Anpassungsfähigkeit fester Vorrichtungen schränkt die Taktzeit der Produktionslinie ein.
Traditionelle Befestigungsstationen verwenden feste Positionierungsformen, die für ein einziges Maschinenmodell bestimmt sind, was zu einer schlechten Anpassungsfähigkeit führt. Die Staubsaugerroboter-Industrie hat eine hohe Produkt-Iterationsgeschwindigkeit. Sobald ein neues Modell die Chassisstruktur optimiert, wird das ursprüngliche Werkzeug direkt verschrottet, was eine neue Werkzeugentwicklung und -verarbeitung erfordert. Während des Werkzeugwechsels muss die gesamte Montagelinie anhalten und warten, was die Gesamteffizienz der Produktion stark beeinträchtigt.
3. Herkömmliche manuelle Verschraubungsprozesse können die Anforderungen an eine intelligente Qualitätsprüfung nicht erfüllen.
Das herkömmliche manuelle Anziehen verlässt sich bei der Steuerung der Kraft vollständig auf die Erfahrung des Bedieners und verfügt nicht über standardisierte Funktionen zur Drehmomenteinstellung und Datenerfassungsmodule. Dies macht es unmöglich, differenzierte Anzugsverfahren für Schrauben in verschiedenen Positionen auf einem Staubsaugerroboter anzupassen. Außerdem werden während der Produktion keine Daten gespeichert. Inline-Qualitätsprüfungen können die Anzugsparameter für jede Schraube nicht verifizieren. Wenn sich eine Schraube nach der Auslieferung des Produkts löst, kann die Produktionsseite die Stationsdaten nicht zurückverfolgen oder die Grundursache ermitteln, wodurch die anspruchsvollen Qualitätskontroll- und Rückverfolgbarkeitsstandards der Smart-Appliance-Industrie nicht erfüllt werden.
II. Danikors gezielte Vor-Ort-Lösung mit einer Servo-Schraubenanzugsmaschine
Um die Schwierigkeiten bei der Montage von Staubsaugerrobotern zu beheben, hat Danikor eine Komplettlösung entwickelt, die einen elektrischen Schraubendreher mit fester Position und ein Servo-Schraubmodul kombiniert. Diese Lösung ersetzt die manuelle Verschraubung und behebt traditionelle Produktionsprobleme in sechs Bereichen: Effizienz, Struktur, Prozess, Qualität, Flexibilität und Daten.
Verbesserte Effizienz beim Verschrauben, Anpassung an die kontinuierliche Taktzeit der Produktionslinie
Das Modul verwendet eine servoelektrische Steuerung mit geschlossenem Regelkreis. Im Vergleich zu herkömmlichen pneumatischen, zylindergetriebenen Modulen wird die kombinierte Taktzeit für die Schraubenzuführung und -befestigung um 25 bis 30 % verbessert. Angesichts des Szenarios einer dichten Verschraubung mit mehreren Punkten auf dem kreisförmigen Roboterchassis ermöglicht das Servomodul dem feststehenden Elektroschrauber einen schnellen Positionswechsel, wodurch die Zeitverluste durch die Start-/Stopp-Pufferung der Zylinder entfallen. Die Verschraubungszeit pro Chassis wird erheblich reduziert, und der Betriebsrhythmus der Anlage entspricht der Taktzeit der Linie.
Schlanke und kompakte Struktur, die das Layout in engen Stationen optimiert
Nach der Strukturoptimierung ist die Gesamtgrundfläche des Servomoduls im Vergleich zu herkömmlichen Pneumatikzylindermodulen um 43 % reduziert. Die Montagestation für Staubsaugerroboter hat nur wenig Platz. Das kompakte Modul kann direkt über der Montagelinie montiert werden, ohne dass größere Änderungen an der Rahmenstruktur erforderlich sind, und spart so Platz.
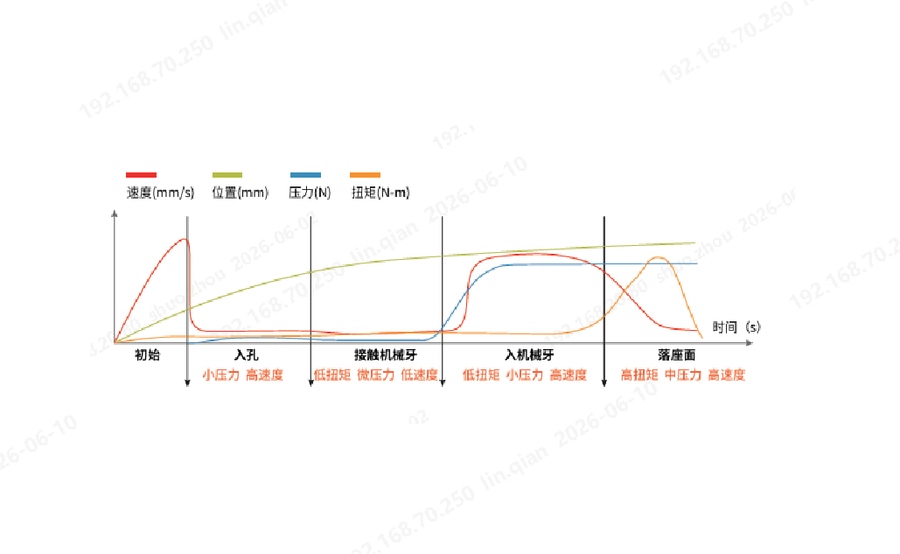
Flexibler und einstellbarer Abwärtsdruck, der eine Beschädigung des Kunststoffgehäuses und der Schraubengewinde ausschließt
Der Abwärtsdruck des Moduls ist während des gesamten Prozesses dynamisch in Echtzeit steuerbar, im Gegensatz zum starren Aufprall, der von alten federartigen Drucksystemen verursacht wird. Das Gehäuse des Staubsaugerroboters ist aus ABS-Kunststoff gefertigt. Während der Befestigung passt das Modul die Belastung nach einer segmentierten Logik an: niedriger Druck und hohe Geschwindigkeit für das Eindringen in das Loch, gefolgt von einem Zieldruck für das Einsetzen des Gewindes. Während des gesamten Prozesses gibt es keine unmittelbare Stoßbelastung, was effektiv verhindert, dass abgenutzte Gewinde und gerissene oder zerdrückte Gehäuse verschrottet werden.
Flexible Steuerung zur Hindernisvermeidung, die sich an Komponenten mit unterschiedlichen Höhen im Gehäuse anpasst
Das Schraubensaugrohr kann die Befestigung an jedem Punkt innerhalb seines maximalen Hubs von 250 mm unterbrechen, was eine flexible Hindernisvermeidung ermöglicht. Im Inneren des Roboterchassis sind Komponenten wie Motoren und Kondensatoren in unterschiedlichen Höhen angeordnet, was zu erheblichen Höhenunterschieden zwischen den Befestigungspunkten führt. Die Fähigkeit des Moduls, Hindernisse zu umgehen, ermöglicht es ihm, automatisch um hervorstehende Werkstückkomponenten herumzufahren. Dies macht zusätzliche mechanische Komponenten für die Z-Achse zur Vermeidung von Hindernissen überflüssig, was die Kosten für die Hardware reduziert und gleichzeitig das Steuerungsprogramm vereinfacht.
Überwachung von Schwimmern (Sitzfehlern), Abfangen von schwimmenden Schraubenfehlern im Vorfeld
Das Modul nutzt die in den Servo eingebaute Positionserkennungsfunktion und kann ein abnormales Schwimmen der Schraube (unvollständiger Sitz) in Echtzeit überwachen, ohne dass ein zusätzlicher Wegsensor erforderlich ist. In der Massenproduktion von Staubsaugerrobotern sind schwimmende Schrauben ein häufiger Qualitätsmangel. Das Modul sammelt Positionsdaten in Echtzeit während des Anziehvorgangs. Wenn eine Schraube als nicht vollständig sitzend (schwimmend) erkannt wird, gibt die Anlage sofort einen Alarm aus und stoppt, um das fehlerhafte Teil auszusondern, wodurch der Ausstoß an nachbearbeiteten Produkten an der Quelle reduziert wird.
Hochintegriertes System, das eine Closed-Loop-Steuerung mit vollständigen Prozessdaten erreicht
Das Servomodul integriert eine Erfassungseinheit für alle Schlüsselelemente: Geschwindigkeit, Position, Druck, Drehmoment und Zeit. In Kombination mit dem feststehenden Elektroschrauber bildet es eine integrierte Schraubeinheit. Die Daten des gesamten Schraubvorgangs werden in Echtzeit gespeichert und können nahtlos an das MES-System der Fabrik angeschlossen werden. Das System speichert die Kurve des Anziehvorgangs für jede einzelne Schraube vollständig und kompensiert damit die fehlende Datenspeicherung beim manuellen Anziehen. Dies erfüllt die Qualitätskontrollstandards für die Rückverfolgbarkeit des Endprodukts und die Fehlerdiagnose nach dem Verkauf.
Darüber hinaus ist es bei Produktiterationen oder Modellwechseln nicht erforderlich, den feststehenden Elektroschrauber zu demontieren oder die Montageposition anzupassen. Lediglich das Bewegungskoordinatenprogramm des Moduls muss innerhalb des Servosteuerungssystems geändert werden. Ein einziger Ausrüstungssatz kann mit der Produktion mehrerer kreisförmiger Chassis mit unterschiedlichen Spezifikationen kompatibel sein, so dass die hohen Kosten für den Stillstand der Produktionslinie für den herkömmlichen Werkzeugwechsel und die wiederholte Entwicklung von Formen entfallen.
Die hochpräzisen Servo-Schraubautomationslösungen von Danikor werden in der Montage von intelligenten Kleingeräten intensiv genutzt. Neben der Befestigungsstation für Staubsaugerroboter kann diese Lösung in großem Umfang für die Befestigung verschiedener unregelmäßiger Präzisionskomponenten wie Staubsaugerantriebsmotoren, Hauptsteuergehäuse für Kleingeräte und intelligente tragbare Geräte eingesetzt werden. Sie kann Haushaltsgeräteherstellern sowohl standardisierte Ausrüstung als auch nicht standardisierte, kundenspezifische Gesamtlösungen für die Befestigung bieten und so die Automatisierung und intelligente Aufrüstung von Produktionslinien unterstützen.