Zu meinen Favoriten hinzufügen
Automatische Übersetzung anzeigen
Dies ist eine automatisch generierte Übersetzung. Wenn Sie auf den englischen Originaltext zugreifen möchten,
klicken Sie hier
#Produkttrends
{{{sourceTextContent.title}}}
Worin besteht der Unterschied zwischen serieller Kinematik und paralleler Kinematik beim mehrachsigen Bewegungsdesign?
{{{sourceTextContent.subTitle}}}
Wir lösen das Positionierungsproblem.
{{{sourceTextContent.description}}}
Die heutigen Positioniertische und -tische beinhalten Hard- und Software, die mehr denn je an die spezifischen Leistungsanforderungen angepasst ist. Das ist für Bewegungsdesigns gedacht, die sich auch durch komplizierte mehrachsige Befehle präzise bewegen.
Präzises Feedback ist der Schlüssel zu dieser Funktionalität - oft in Form von optischen oder (elektronisch erweiterten) magnetischen Drehgebern für Auflösung und Wiederholgenauigkeit im Nanometerbereich.... auch über lange Strecken.
Tatsächlich treibt das Miniaturstufendesign die größte Innovation aus Rückführungs- und Regelalgorithmen voran, um auch sehr große Lasten mit Submikrometergenauigkeit zu bewegen.
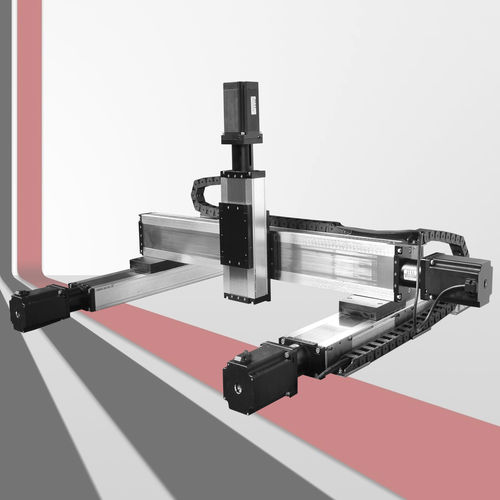
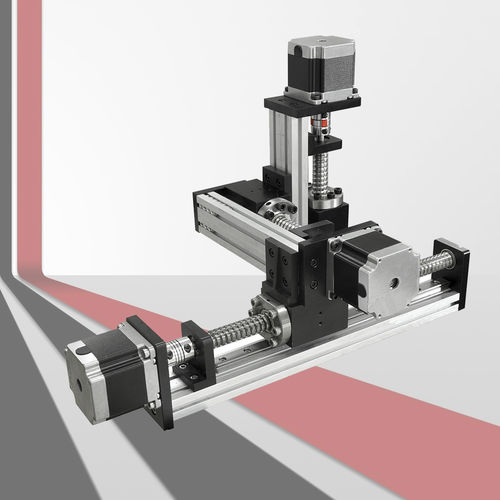
Zuerst etwas Hintergrund: Der Einsatz von vorgefertigten Stufen und kartesischen Robotern nimmt mit Rapid Prototyping, automatisierten Forschungsanwendungen und engerem Time-to-Market-Druck weiter zu. Das gilt insbesondere für die Bereiche Photonik, Medizintechnik und Halbleiter-F&E und -Produktion. In der Vergangenheit bedeutete der Aufbau von mehrachsigen Bewegungen zur Automatisierung oder anderweitigen Verbesserung von Aufgaben, dass Konstrukteure Lineartische in X-Y-Z-Kombinationen.... intern beschaffen und kombinieren mussten.
Weitere Freiheitsgrade erforderten die nachträgliche Zugabe von Goniometern, Drehtischen und anderen Endeffektoren.
Solche Maschinenkonstruktionen, die als serielle Kinematik bezeichnet werden, führen manchmal zu sperrigen Konfigurationen mit kumulierten Fehlern aufgrund von Toleranzstapelungen. In einigen Fällen begrenzen Lager solche Baugruppen auch auf einen Drehpunkt.
Dies sind keine Probleme, wenn das Design seine Bewegungsanforderungen erfüllt.... aber insbesondere Miniatur-Bewegungsdesigns sind nicht so verzeihend für solche Faktoren.
Im Gegensatz dazu stehen Hexapod- oder Stewart-Plattformen - Formen paralleler kinematischer Stellglieder für die Bewegung. Zumindest bei miniaturisierten mehrachsigen Bewegungsanordnungen übertreffen diese die serielle Kinematik. Das liegt zum Teil daran, dass die Hexapod-Ausgangsbewegung nicht durch die Lagerleistung (linear und drehbar) begrenzt wird.
Stattdessen führen die Bewegungssteuerungen Algorithmen zu einem anwendungsdefinierten Drehpunkt (Drehpunkt) aus, der nicht durch Fehlerakkumulation belastet ist. Geringere Komponentenanzahl, geringere Trägheit und höhere Steifigkeit sind weitere Vorteile.