Automatische Übersetzung anzeigen
Dies ist eine automatisch generierte Übersetzung. Wenn Sie auf den englischen Originaltext zugreifen möchten, klicken Sie hier
#Neues aus der Industrie
{{{sourceTextContent.title}}}
Analyse von Anzugsstrategien für Servoschrauber
{{{sourceTextContent.subTitle}}}
Anzugsstrategien für Servo-Schraubendreher, Elektroschrauber mit Drehmomentkontrolle, drehmomentgesteuerte Schraubendreher
{{{sourceTextContent.description}}}
In der industriellen Fertigung entscheidet die Anzugsqualität von Schrauben direkt über die Zuverlässigkeit des Produkts. Da sich die Anzugsverfahren bei den verschiedenen Produkten stark unterscheiden, müssen Servoschrauber mehrere Anzugsstrategien unterstützen, um den unterschiedlichen Befestigungsanforderungen gerecht zu werden. Selbst wenn man nur Drehmoment und Winkel als Parameter verwendet, können drei Strategien gebildet werden: "Drehmoment plus Winkel", "Drehmoment oder Winkel" und "Drehmoment und Winkel" Ihre Steuerungslogik und Anwendungsszenarien unterscheiden sich deutlich. Dieser Artikel bietet eine eingehende Analyse dieser drei Strategien.
Bevor die Strategien im Detail erläutert werden, ist es wichtig, die Beziehung zwischen Drehmoment/Winkel und Schließkraft zu klären. Die Klemmkraft ist das ultimative Ziel der Schraubenbefestigung, aber sie kann nicht direkt gemessen werden, sondern nur indirekt über Drehmoment und Winkel abgeleitet werden.
Drehmoment: Die auf die Schraube ausgeübte Rotationskraft. Ein höheres Drehmoment erhöht in der Regel die Klemmkraft, wird aber stark von der Reibung beeinflusst (z. B. Öl auf der Schraubenoberfläche, Ablagerungen in den Gewindebohrungen).
Winkel: Die Drehung während des Anziehens. Bei festen Gewindespezifikationen korreliert der Winkel direkt mit der "Einschraubtiefe" der Schraube und spiegelt die Änderungen der Klemmkraft genauer wider.
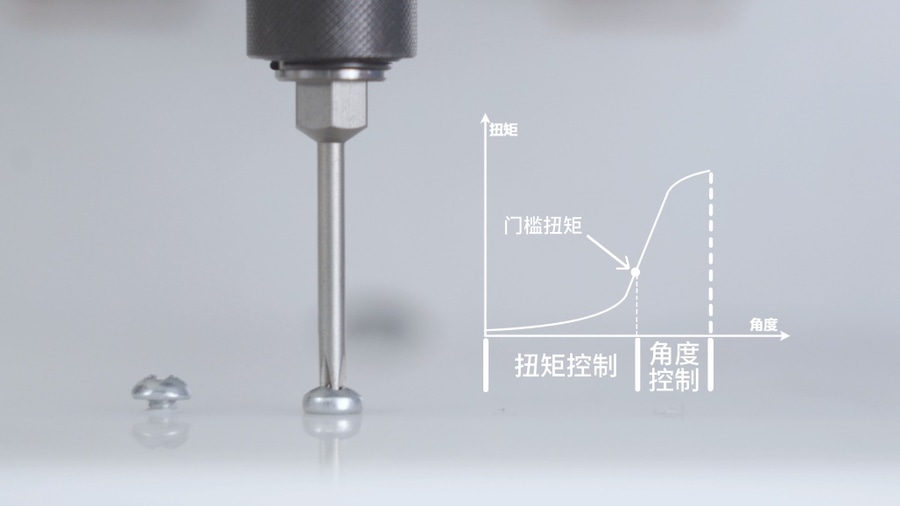
Das Wesen eines Servoschraubers besteht darin, die Spannkraft indirekt zu steuern, indem er Drehmoment-Winkel-Regeln vorgibt, Echtzeit-Sensordaten mit Schwellenwerten vergleicht und einen Stoppbefehl auslöst. Der Hauptunterschied zwischen den drei Strategien liegt in der Art und Weise, wie sie "Drehmomentschwellen" und "Winkelschwellen" logisch auswerten
(1) Drehmoment plus Winkel: Eliminierung von Reibungsstörungen durch zweistufige Steuerung
"Drehmoment plus Winkel" ist eine zweistufige Strategie mit der Logik: "Erst den Kontakt sicherstellen, dann die Klemmkraft präzise steuern."
Stufe 1 (Vorspannen): Der Servoschrauber arbeitet im drehmomentgesteuerten Modus, bis das voreingestellte Drehmoment erreicht ist, und schaltet dann auf Winkelsteuerung um. Dadurch werden Lücken in den Kontaktflächen (z. B. Rückprall von Dichtungen, Montagetoleranzen) beseitigt, um einen vollständigen Werkstückkontakt zu gewährleisten.
Stufe 2 (Endanzug): Der Schrauber schaltet auf Winkelsteuerung um und dreht sich unabhängig von Drehmomentänderungen um einen voreingestellten Winkel, der bei Erreichen des Winkels gestoppt wird.
Da der Endwinkel direkt der Schraubendehnung entspricht, vermeidet diese Strategie reibungsbedingte Fehler und liefert eine hochpräzise Spannkraft. Sie eignet sich für Anwendungen, die eine gleichmäßige Spannkraft erfordern, wie z. B. Fahrwerksbolzen oder kritische Motorverbindungen, bei denen Reibungsschwankungen das größte Qualitätsrisiko darstellen.
(2) Drehmoment oder Winkel: Jeder der beiden Parameter löst einen Stopp aus - ideal für Teile mit geringer Konsistenz
"Drehmoment oder Winkel" ist eine fehlertolerante Strategie: "Sofort anhalten, wenn entweder das Drehmoment oder der Winkel seinen Schwellenwert erreicht."
Der Bediener gibt das Ziel-Drehmoment und den Ziel-Winkel vor. Wenn der Widerstand der Baugruppe gering ist (z. B. übergroße Bohrung), kann der Winkel zuerst erreicht werden; wenn der Widerstand hoch ist (z. B. untergroße Bohrung), kann das Drehmoment zuerst erreicht werden. In beiden Fällen wird der Prozess gestoppt, um ein Überdrehen und Risse im Werkstück zu vermeiden.
Diese Logik mit zwei Schwellenwerten und einem Auslöser mindert die Risiken einer Ein-Parameter-Steuerung und eignet sich daher für Teile mit hoher Variabilität, wie z. B. bei der Montage von Haushaltsgeräten, bei denen die Positionen der Kunststofflöcher von Charge zu Charge unterschiedlich sind.
(3) Drehmoment und Winkel: Beide müssen die Schwellenwerte erreichen - eliminiert falsches Anziehen
bei "Drehmoment und Winkel" müssen "beide Parameter ihre Schwellenwerte erreichen, bevor sie gestoppt werden - keiner von beiden kann fehlen."
Wenn das Drehmoment erreicht wird, aber der Winkel nicht ausreicht, fährt der Schrauber fort, bis der Winkel erreicht ist, und umgekehrt. Beim letzten Durchgang müssen beide Werte immer noch innerhalb der Spezifikation liegen. Durch diese doppelte Überprüfung wird ein falsches Anziehen verhindert, was für Hochsicherheits-, Luft- und Raumfahrt- oder medizinische Komponenten, bei denen eine einzige lockere Verbindung zu einem katastrophalen Ausfall führen kann, von entscheidender Bedeutung ist.
Für die Hersteller bedeutet die Wahl der richtigen Strategie nicht nur eine Verbesserung der Produktqualität, sondern auch eine Senkung der Kosten nach dem Verkauf. Da die neue Energiebranche, die Luft- und Raumfahrt und andere Sektoren immer höhere Anforderungen an die Qualität der Verbindungen stellen, wird sich die verfeinerte Anwendung fortschrittlicher Strategien zu einem Branchentrend entwickeln.