Automatische Übersetzung anzeigen
Dies ist eine automatisch generierte Übersetzung. Wenn Sie auf den englischen Originaltext zugreifen möchten, klicken Sie hier
#Produkttrends
{{{sourceTextContent.title}}}
Wie können elektrische Drehmomentschraubendreher die Auswirkungen des Reibungskoeffizienten verringern?
{{{sourceTextContent.subTitle}}}
Elektrische Drehmomentschraubendreher
{{{sourceTextContent.description}}}
Im Bereich der mechanischen Montage stellen Schraubverbindungen die grundlegendste und kritischste Verbindungsmethode dar. Die Qualität der Befestigung entscheidet direkt über die Betriebsstabilität, Sicherheit und Lebensdauer der Ausrüstung. Allerdings werden etwa 90 % des Drehmoments beim Anziehen der Schrauben zur Überwindung des Reibungswiderstands verbraucht. Diese Eigenschaft bedeutet, dass selbst geringe Schwankungen des Reibungskoeffizienten zu erheblichen Abweichungen der endgültigen Klemmkraft führen können, wodurch potenzielle Gefahren eines Geräteausfalls entstehen. Um dieses Problem zu lösen, kann die zusammengesetzte "Drehmoment- und Winkel"-Steuerungsstrategie von elektrischen Drehmomentschraubern die Auswirkungen von Reibungskoeffizientenschwankungen auf die Spannkraft wirksam reduzieren und so eine zuverlässige Gewähr für eine hochpräzise Montage bieten.
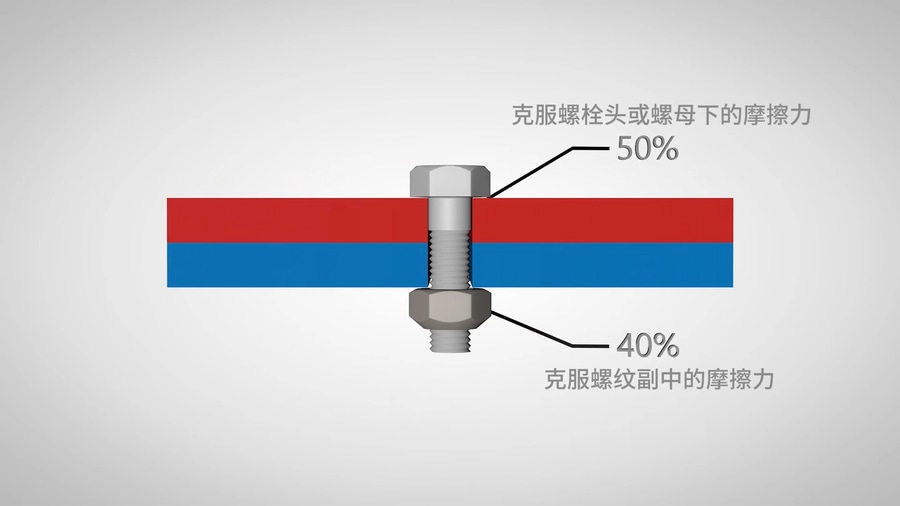
Um die Auswirkungen von Reibwertschwankungen auf die Schraubenspannkraft zu verstehen, muss man zunächst die mechanischen Prinzipien des Schraubenanzugs verstehen. Beim Schraubenanziehen wird im Wesentlichen das vom elektrischen Drehmomentschrauber abgegebene Drehmoment in eine Schraubenvorspannung umgewandelt, wodurch eine zuverlässige Klemmkraft zwischen den Werkstücken erzeugt wird, die eine stabile Verbindungsstruktur bildet. In der Praxis wird jedoch der größte Teil des Drehmoments zur Überwindung der Reibung verwendet, einschließlich der Reibung zwischen den Gewinden und der Stirnflächenreibung zwischen Schraubenkopf und Werkstückkontaktfläche. Diese beiden Reibungskomponenten machen bis zu 90 % des Drehmomentverbrauchs aus, wobei nur etwa 10 % des Drehmoments tatsächlich in Klemmkraft umgesetzt werden. Der Reibungskoeffizient wird von mehreren Faktoren beeinflusst, wie z. B. der Genauigkeit der Gewinde- und Stirnflächenbearbeitung, der Oberflächenrauheit, den Schmierbedingungen, der Materialverträglichkeit usw. Geringfügige Änderungen dieser Faktoren können zu Schwankungen des Reibungskoeffizienten führen, was bei gleichem Eingangsdrehmoment erhebliche Abweichungen der Spannkraft zur Folge hat, wodurch die Anforderungen an eine hochpräzise Montage nicht erfüllt werden. Die "Drehmoment- und Winkel"-Steuerungsstrategie für elektrische Drehmomentschrauber ermöglicht eine dynamische Anpassung und Alarmierung bei Unregelmäßigkeiten durch die gleichzeitige Überwachung von zwei Kernparametern - Drehmoment und Drehwinkel - und deren Vergleich mit voreingestellten Schwellenwerten.
I. Szenarien mit hoher Reibung: Mechanismus zur Winkelkompensation bei elektrischen Drehmomentschraubern
In Szenarien mit hohem Reibungskoeffizienten kommt es aufgrund des erhöhten Reibungswiderstands zwischen Gewinden und Stirnflächen leicht zu der Situation, dass das Drehmoment die Normen erfüllt, der Drehwinkel jedoch nicht" (das Drehmoment erreicht den vorgegebenen Grenzwert, der Drehwinkel jedoch nicht den entsprechenden Hub). In diesem Fall ist die tatsächliche Klemmkraft oft unzureichend. Um dieses Problem zu lösen, aktiviert die zusammengesetzte Kontrollstrategie von elektrischen Drehmomentschraubern den Winkelkompensationsmechanismus: Wenn das Drehmoment zuerst den voreingestellten Wert erreicht, hält der elektrische Drehmomentschrauber nicht sofort an, sondern fährt mit dem Drehen der Schraube fort, bis der Drehwinkel den voreingestellten Grenzwert erreicht. Während dieses Vorgangs überwacht der elektrische Drehmomentschrauber kontinuierlich die Drehmomentänderungen in Echtzeit. Überschreitet das Drehmoment aufgrund des weiter ansteigenden Reibungswiderstandes die Sicherheitsobergrenze, löst der elektrische Drehmomentschrauber sofort den Alarmmechanismus aus und hält an, um eine Verformung der Schraube, einen Bruch oder eine Beschädigung der angeschlossenen Teile durch Überlastung zu verhindern. Dies gewährleistet sowohl die Einhaltung der normgerechten Klemmkraft als auch die Sicherheit während des Schraubvorgangs.
II. Reibungsarme Szenarien: Drehmomentkompensationsmechanismus von elektrischen Drehmomentschraubern
In Szenarien mit niedrigem Reibungskoeffizienten, in denen der Reibungswiderstand kleiner und der Rotationswiderstand der Schraube gering ist, kann es leicht zu der Situation kommen, dass der Winkel die Norm erfüllt, das Drehmoment jedoch nicht (der Rotationswinkel der Schraube erreicht den voreingestellten Hub, aber das vom elektrischen Drehmomentschrauber abgegebene Drehmoment hat noch nicht den voreingestellten Wert erreicht). In diesem Fall entspricht auch die Vorspannkraft nicht den Anforderungen. Bei dieser Betriebsbedingung aktiviert die zusammengesetzte Kontrollstrategie von elektrischen Drehmomentschraubern den Drehmomentkompensationsmechanismus: Wenn der Winkel zuerst den voreingestellten Wert erreicht, hört der elektrische Drehmomentschrauber nicht auf zu arbeiten, sondern hält die Leistungsabgabe aufrecht, bis das Drehmoment den voreingestellten Schwellenwert erreicht. Erst wenn sichergestellt ist, dass sowohl das Drehmoment als auch der Winkel innerhalb der sicheren Grenzwerte liegen, wird der Schraubvorgang abgeschlossen und die Maschine angehalten. Dieser Mechanismus zur Einhaltung von zwei Standards vermeidet grundsätzlich die Beschränkungen einer Ein-Parameter-Steuerung. Durch die gemeinsame Überwachung und dynamische Kompensation dieser beiden Kernparameter durch den elektrischen Drehmomentschrauber werden die negativen Auswirkungen von Schwankungen des Reibungskoeffizienten wirksam ausgeglichen, so dass die Spannkraft konstant innerhalb eines angemessenen Bereichs bleibt.