Veröffentlicht am 05.06.2026
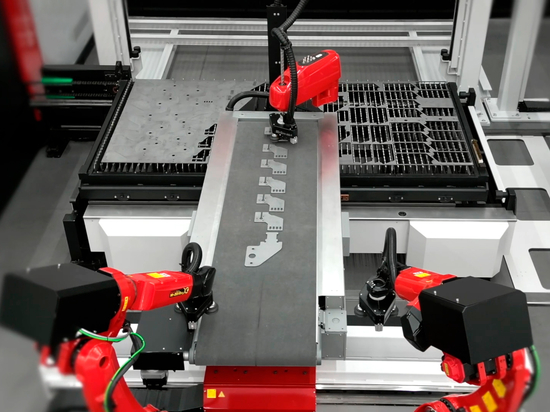
Dieser Artikel erklärt, wie geeignete harmonische und planare Robotergelenkmodule für verschiedene Subsysteme humanoider und AGV-Roboter wie Arme, Torso, Kopf und Beine basierend auf ihren funktionalen und mechanischen Anforderungen ausgewählt werden
Dieser Artikel bietet eine detaillierte Anleitung zur Auswahl von Robotergelenkmodulen in AGV- und humanoiden Robotersystemen und zeigt, dass verschiedene Subsysteme—Doppelarme, Torso, Kopf, Hebebeine und Faltbeine—unterschiedliche Anforderungen hinsichtlich Drehmoment, Steifigkeit, Präzision, Gewicht, Vibrationskontrolle und Stoßfestigkeit haben. Er erläutert, wie harmo...