Veröffentlicht am 19.05.2026
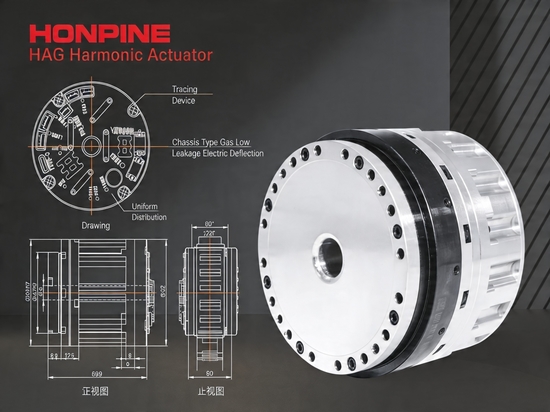
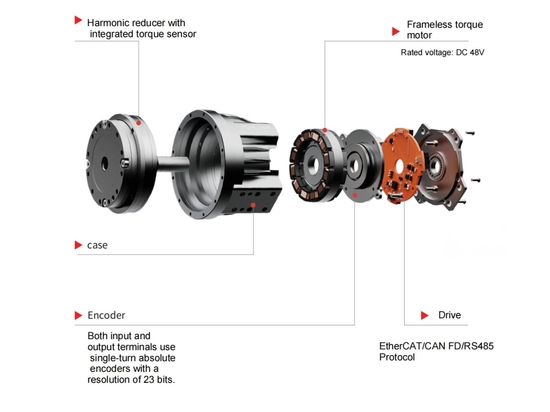
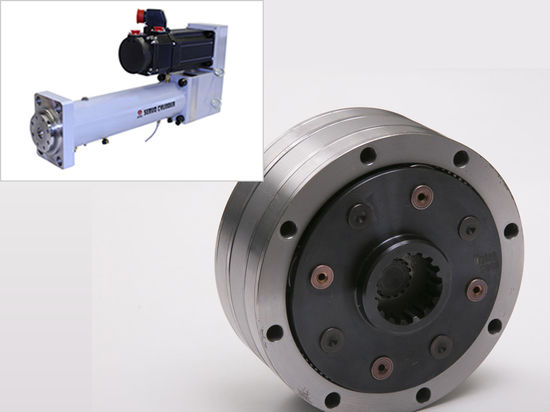
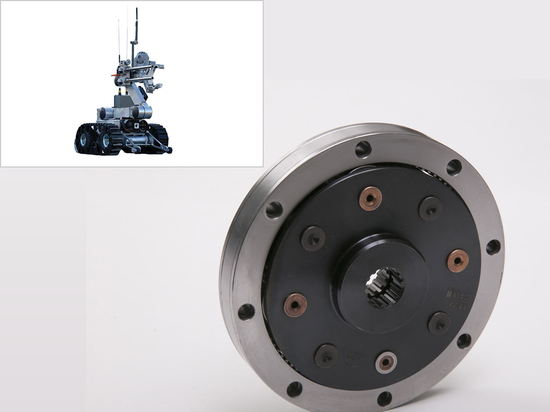
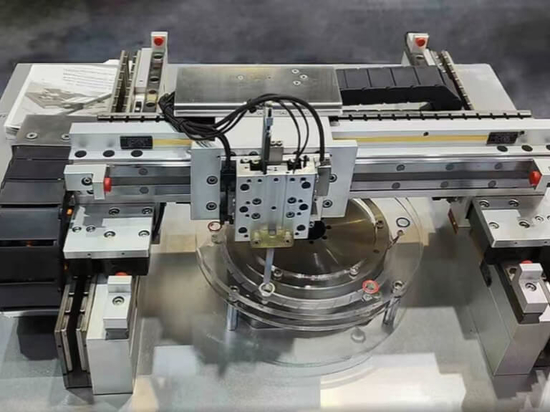
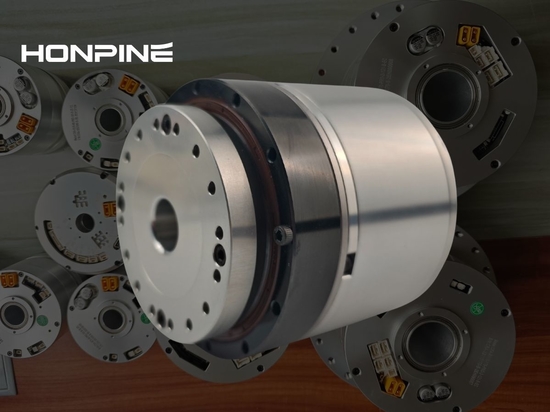
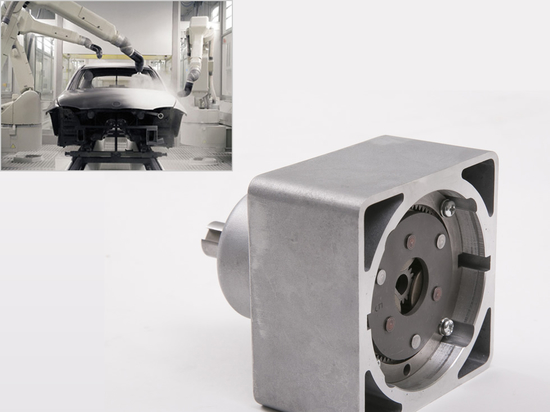
Der HONPINE HAG Harmonic Drive Roboter-Gelenkaktor bietet eine hochintegrierte und leistungsstarke Lösung für humanoide Roboter und intelligente Automatisierungssysteme – mit flexiblen Konfigurationsmöglichkeiten und professioneller Unterstützung bei
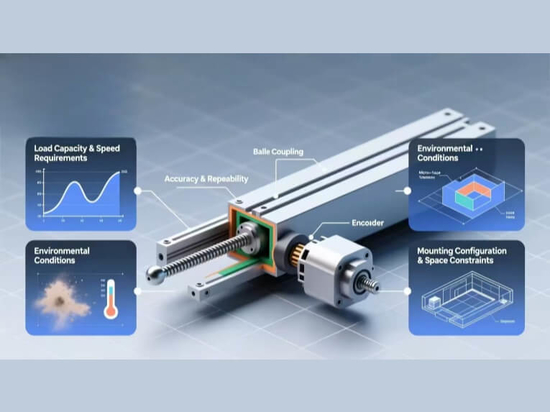
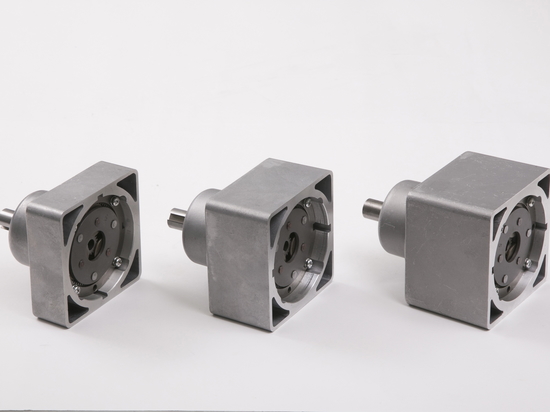
Der Artikel stellt den neu eingeführten HONPINE HAG Harmonic Drive Roboter-Gelenkaktor vor und erklärt, wie das passende Modell anhand von Faktoren wie Baugröße, Untersetzungsverhältnis, Drehmomentsensor-Konfiguration, Kommunikationsprotokoll, Bremsoptionen, Encoder-Typ und kundenspezifischen Anforderungen ausgewählt wird.
Durch die Integration von Harmonic-Getriebe, rah...